Kollaborative Roboter
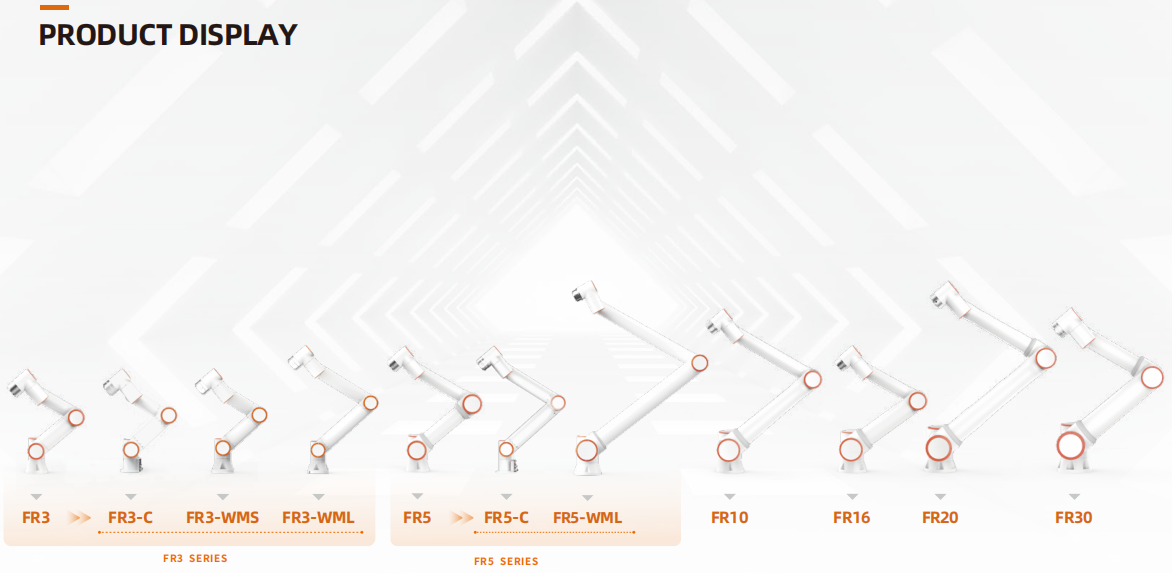
Produktmatrix
Schnellstart
- 1. Robotermontage und Inbetriebnahme
- 2. WebApp Zugriff und Anmeldung
- 3. Parametereinstellungen des Roboters
- 4. Manuelles Teach-in des Roboters
- 5. Schnellprogrammierung des Roboters
Benutzerhandbuch
- 1. Präambel
- 2. Einführung in den Roboter
- 3. Hardwareinstallation
- 3.1. Sicherheitshinweise
- 3.2. Gerätetransport
- 3.3. Wartung, Inspektion, Entsorgung
- 3.3.1. Wartungshandhabung
- 3.3.2. Inspektionshandbuch
- 3.3.3. Erläuterung der digitalen Ein- und Ausgänge des Steuerschranks
- 3.3.4. Entsorgung
- 3.4. Installationsvorschriften
- 3.4.1. Montage des Roboterarms
- 3.4.2. Montage des Werkzeugflansches
- 3.4.3. Installationsumgebung
- 3.4.4. Bodenbelastbarkeit
- 3.4.5. Lastkurven der gesamten Serie
- 3.4.5.1. Überblick
- 3.4.5.2. Parameterbeschreibung
- 3.4.5.2.1. Lastkurve für kollaborativen Roboter FR3
- 3.4.5.2.2. Lastkurve für kollaborativen Roboter FR3-WMS
- 3.4.5.2.3. Lastkurve für kollaborativen Roboter FR3-WML
- 3.4.5.2.4. Lastkurve für kollaborativen Roboter FR3-C
- 3.4.5.2.5. Lastkurve für kollaborativen Roboter FR5
- 3.4.5.2.6. Lastkurve für kollaborativen Roboter FR5-WML
- 3.4.5.2.7. FR5-C Modell Kollaborativer Roboter Lastkurve
- 3.4.5.2.8. Lastkurve für kollaborativen Roboter FR10
- 3.4.5.2.9. Lastkurve für kollaborativen Roboter FR16
- 3.4.5.2.10. Lastkurve für kollaborativen Roboter FR20
- 3.4.5.2.11. Lastkurve für kollaborativen Roboter FR30
- 3.5. Steuerungsanschluss
- 3.5.1. Controller-Schnittstellen
- 3.5.2. I/O-Panel des Steuerschranks
- 3.5.3. RJ45-Netzwerkschnittstellengruppe
- 3.5.4. Flanschplatine
- 3.5.5. Erdungshinweise
- 3.5.6. Allgemeine Spezifikationen für alle digitalen I/Os
- 3.5.7. Sicherheits-I/O
- 3.5.8. Allgemeine digitale I/O
- 3.5.9. Digitaler Eingang über Taster
- 3.5.10. Interaktion mit anderen Geräten oder SPSen
- 3.5.11. Analoge I/O
- 3.5.12. Optionale Module für FR3MT & 3C
- 3.6. Teach Pendant und LED an der Flanschseite
- 4. Schnellstart des Roboters
- 5. Grundlegende Funktionen der Teach-Pendant-Software
- 6. Grundlagen
- 6.1. Montage
- 6.2. Koordinatensysteme
- 6.3. Last
- 6.4. Gelenke
- 6.4.1. Software-Endschalter (Soft Limits)
- 6.4.2. Kollisionsstufe
- 6.4.3. Reibungskompensation
- 6.4.4. Funktion zur Anpassung des Reibungskompensationsfaktors
- 6.4.5. Zugkraftkompensation
- 6.5. I/O-Einstellungen
- 6.6. Arbeitsursprung
- 6.7. Automatische TCP-Kalibrierung mit Lichtschranke
- 6.8. TCP-Kalibrierung mit Plattenwerkzeug
- 6.9. Lichtbogen-Tracking-Funktion mit analoger Rückmeldung des Steuerpults
- 6.10. Kollisionserkennung für Linearzahnstangenführungen
- 6.11. Nullpunktkalibrierung des Kraftsensors unter Last und Admittanzparameter für freie Ausrichtung
- 7. Sicherheit
- 7.1. Sicherheitsstopp
- 7.2. Sicherheitsgeschwindigkeit
- 7.3. I/O-Sicherheit
- 7.4. Not-Halt-Stopp
- 7.5. Schutzhalt
- 7.6. Interferenzzonen-Konfiguration
- 7.7. Reduzierter Modus
- 7.8. Sicherheitswand
- 7.9. Sicherheits-Hintergrundprogramm
- 7.10. Werkzeugrichtungsbegrenzung (nur unter LA-System)
- 7.11. Robotergrenzwerte (nur unter LA-System)
- 7.12. Leistungserkennung (nur unter QX-System)
- 7.13. Bewegungskonfiguration
- 8. Peripheriegeräte
- 8.1. Benutzerdefiniertes offenes Protokoll für die Flanschseite (Lua)
- 8.2. Greifer
- 8.3. Kraftsensor
- 8.3.1. Bereits angepasste Geräte
- 8.3.2. Lua-Flanschprotokoll für Kraftsensoren
- 8.3.3. Lua-Flanschprotokoll für Schweißgriffe
- 8.3.4. Nutzlastidentifikation mit Sensor
- 8.3.5. Unterstütztes Ziehen (Drag) mit Kraftsensor
- 8.3.6. Kollisionserkennung mit Kraft-/Drehmomentsensor
- 8.3.7. Kraftgeregelte Bewegung mit Kraft-/Drehmomentsensor
- 8.3.8. Spiralförmiges Einführen mit Kraft-/Drehmomentsensor
- 8.3.9. Drehendes Einführen mit Kraft-/Drehmomentsensor
- 8.3.10. Lineares Einführen mit Kraft-/Drehmomentsensor
- 8.3.11. Oberflächenlokalisierung mit Kraft-/Drehmomentsensor
- 8.3.12. Zentrumslokalisierung mit Kraft-/Drehmomentsensor
- 8.3.13. Benutzerdefiniertes offenes Protokoll
- 8.4. Schweißgriff
- 8.5. Spritzpistole
- 8.6. Schweißgerät
- 8.6.1. Montage des Schweißbrenners
- 8.6.2. Konfiguration der Schweißgeräteparameter
- 8.6.3. Erstellung des Schweißprogramms
- 8.6.4. Schweißunterbrechung und Wiederaufnahme
- 8.6.5. Kommunikationsanpassung für Roboter-Laserschweißgerät
- 8.6.6. Anhang 1: UDP-Kommunikationsprotokoll des Roboters
- 8.6.7. Digitales Kommunikationsprotokoll (Modbus TCP)
- 8.6.7.1. Protokollkonfiguration
- 8.6.7.2. Offenes Schweißgeräteprotokoll
- 8.6.7.2.1. Beispiel für ein offenes Schweißgeräteprotokoll
- 8.6.7.2.2. Analyse des offenen Schweißgeräteprotokolls
- 8.6.7.2.3. Hochladen und Laden des offenen Schweißgeräteprotokolls
- 8.6.7.2.4. Schweißgerätetest (Debugging)
- 8.6.7.2.5. Erstellung des Schweißprogramms
- 8.6.7.2.6. Entladen des offenen Schweißgeräteprotokolls
- 8.7. Konfiguration der Erweiterungsachse
- 8.7.1. Koordinatensystem der Erweiterungsachse
- 8.7.2. Steuerung + SPS (UDP-Kommunikation)
- 8.7.3. Test des Wagens mit zwei Freiheitsgraden
- 8.7.4. Steuerung + Servoantrieb (485-Kommunikation)
- 8.8. Linienlasersensor
- 8.8.1. Hardware-Verdrahtung
- 8.8.2. Sensorkonfiguration
- 8.8.3. Sensorkalibrierung
- 8.8.4. Lasersensor-Anwendung
- 8.8.5. Anpassung des Lasersensors an das offene Peripherieprotokoll der Steuerung
- 8.9. Schleifen
- 8.10. Hilfssensor
- 8.11. Kombinationsgerät (SmartTool + Kraftsensor-Kombination)
- 8.12. Array-Saugnapf
- 8.12.1. Überblick
- 8.12.2. Funktionskonfiguration
- 8.12.3. Anwendung von LUA-Programmen für Array-Saugnapf
- 8.13. CNC-Funktionspaket basierend auf FOCAS (nur unter Linux-Systemen)
- 8.14. Konfiguration einer virtuellen Wand basierend auf einem Kraftsensor
- 8.15. Funktion zur Laser-Punktverfolgung mit Erweiterungsachse
- 8.15.1. Systemaufbau für Laser-Punktverfolgung mit Roboter-Erweiterungsachse
- 8.15.2. Kommunikationskonfiguration der Erweiterungsachse
- 8.15.3. Verbindungskonfiguration des Schweißnaht-Tracking-Lasersensors
- 8.15.4. Verbindungskonfiguration des Schweißgeräts
- 8.15.5. Kalibrierung des Werkzeugkoordinatensystems und des Lasersensor-Koordinatensystems
- 8.15.6. Funktion zur Laser-Punktverfolgung mit Erweiterungsachse
- 8.16. Funktion zum Abrufen der Position von Laser-Suchpunkten
- 8.17. Anwendung des DARU DFC Kraftregelungs-Schleifkopfs
- 8.18. Endeffektor-Transparentübertragungsfunktion
- 8.18.1. Überblick
- 8.18.2. Anwendungshinweise
- 8.18.3. Lua-Skript für die Endeffektor-Transparentübertragungsfunktion
- 8.18.3.1. Überblick
- 8.18.3.2. Hinweise zum Schreiben von Endeffektor-Lua-Skripten
- 8.18.3.2.1. Lua C-registrierte Funktionen für Rs485-Senden und -Empfangen
- 8.18.3.2.2. Lua C-registrierte Funktionen für azyklische Datenübertragung und -rückmeldung
- 8.18.3.2.3. Lua C-registrierte Funktion für zyklische Datenrückmeldung
- 8.18.3.2.4. Lua-Skript, geschrieben am Beispiel des DIO Health Care Moxibustion-Kopfes
- 8.19. Funktion der Geschickten Hand
- 9. Programmierung
- 9.1. Einführung
- 9.2. Werkzeugleiste
- 9.3. Programmbefehle
- 9.4. Logikbefehls-Oberfläche
- 9.5. Bewegungsbefehls-Oberfläche
- 9.5.1. Punkt-zu-Punkt-Befehl
- 9.5.2. Lin-Befehl
- 9.5.3. Kreisbogen-Befehl
- 9.5.4. Kreis-Befehl
- 9.5.5. Spiral-Befehl
- 9.5.6. Neuer Spiral-Befehl
- 9.5.7. Horizontal-Spiral-Befehl
- 9.5.8. Spline-Befehl
- 9.5.9. Neuer Spline-Befehl
- 9.5.10. Pendel-Befehl
- 9.5.11. Bahnreproduktions-Befehl
- 9.5.12. Punktversatz-Befehl
- 9.5.13. Servo-Befehl
- 9.5.14. Bahn-Befehl
- 9.5.15. BahnJ-Befehl
- 9.5.16. DMP-Befehl
- 9.5.17. Werkstücktransformations-Befehl
- 9.5.18. Werkzeugtransformations-Befehl
- 9.6. Steuerbefehls-Oberfläche
- 9.7. Peripheriebefehls-Oberfläche
- 9.8. Schweißbefehls-Oberfläche
- 9.9. Kraftregelungsbefehls-Oberfläche
- 9.10. Visuelle Befehls-Oberfläche
- 9.11. Palettierbefehls-Oberfläche
- 9.12. Kommunikationsbefehls-Oberfläche
- 9.13. Hilfsbefehls-Oberfläche
- 9.14. Überprüfung auf ungespeicherte Teach-Programme
- 9.15. Verschlüsselung von Teach-Programmen
- 9.16. Lokale Teachpunkte
- 9.17. Aktuelles Programm-Backup
- 9.18. Modbus TCP Kommunikation
- 9.19. Roboter-Hintergrundprogramme
- 9.20. Schleifen mit konstanter Kraft in XY-Richtung
- 9.21. Funktion zur automatischen Vermeidung von Singularitäten auf der Bahn
- 9.22. Funktion zur Durchquerung von Singularitäten im Automatikmodus
- 9.23. Echtzeit-Vorausschau-Bahnplanungsfunktion
- 9.24. Lichtbogen-Tracking-Funktion mit monotoner Amplitudenänderung
- 9.25. Lichtbogen-Tracking-Funktion mit Versatz
- 9.26. Funktion zur benutzerdefinierten Kollisionserkennungsschwelle
- 9.26.1. Übersicht
- 9.26.2. Erläuterung der Funktionseinstellung
- 9.27. Optimierung der T-förmigen Geschwindigkeitscharakteristik + Blending-Funktion
- 9.27.1. Übersicht
- 9.27.2. Ablauf
- 9.27.2.1. Blending von PTP-PTP
- 9.27.2.2. Blending von PTP-LIN
- 9.27.2.3. Blending von PTP-ARC
- 9.27.2.4. Blending von PTP-CIRCLE
- 9.27.2.5. Blending von LIN-PTP
- 9.27.2.6. Blending von LIN-LIN
- 9.27.2.7. Blending von LIN-ARC
- 9.27.2.8. Blending von LIN-CIRCLE
- 9.27.2.9. Blending von ARC-PTP
- 9.27.2.10. Blending von ARC-LIN
- 9.27.2.11. Blending von ARC-ARC
- 9.27.2.12. Blending von ARC-CIRCLE
- 9.27.2.13. Blending von CIRCLE-PTP
- 9.27.2.14. Blending von CIRCLE-LIN
- 9.27.2.15. Blending von CIRCLE-ARC
- 9.27.2.16. Blending von CIRCLE-CIRCLE
- 9.27.2.17. Blending bei asynchroner Bewegung der Erweiterungsachse
- 9.27.2.18. Blending bei synchroner Bewegung der Erweiterungsachse
- 9.28. Funktion des Pendel-Seitenneigungswinkels
- 9.29. Funktion für allmähliche Änderung von Schweißparametern (Strom, Spannung, Vorschubgeschwindigkeit entlang der Schweißnaht)
- 9.29.1. Übersicht
- 9.29.2. Ablauf für die allmähliche Änderung von Strom- und Spannungsparametern
- 9.29.3. Ablauf für die allmähliche Änderung des Vorschubgeschwindigkeitsparameters
- 9.29.4. Funktion für graduelle Änderung der Verweilzeit beim Pendeln
- 9.29.5. Funktion für stationäres Pendeln
- 9.29.6. Laser-Stationärpendelfunktion
- 9.30. Roboter ModbusRTU Kommunikation
- 9.30.1. Übersicht
- 9.30.2. Erläuterung der Bedienung des Roboter-ModbusRTU-Masters
- 9.30.3. Erläuterung der Bedienung des Roboter-ModbusRTU-Slaves
- 9.30.3.1. Kommunikationsparametereinstellung des ModbusRTU-Slaves
- 9.30.3.2. Kommunikationstest des ModbusRTU-Slaves
- 9.30.3.3. Programmerstellung für ModbusRTU-Slave
- 9.30.3.3.1. Schreiben eines einzelnen digitalen Ausgangs DO (diskreter Eingang)
- 9.30.3.3.2. Schreiben mehrerer digitaler Ausgänge DO (diskrete Eingänge)
- 9.30.3.3.3. Lesen eines einzelnen digitalen Ausgangs DO (diskreter Eingang)
- 9.30.3.3.4. Lesen mehrerer digitaler Ausgänge DO (diskrete Eingänge)
- 9.30.3.3.5. Lesen digitaler Eingänge DI (Spulen)
- 9.30.3.3.6. Lese-/Schreiboperationen für analoge Ausgänge AO (Eingangsregister) und analoge Eingänge AI (Halteregister)
- 9.30.3.3.7. Warten auf digitalen Eingang
- 9.30.3.3.8. Warten auf analogen Eingang
- 9.30.3.4. Roboterstatusrückmeldung und -steuerung über ModbusRTU-Slave
- 9.31. Schutz der Posenanpassungsfunktion basierend auf dem 6-Achsen-Kraftsensor
- 9.32. Socket-Kommunikationsoberflächenfunktion
- 9.33. Impedanzregelungsfunktion während der Roboterbewegung
- 9.34. Benutzerdefinierte Pendelschweißfunktion
- 9.35. Teachpunkt-Konfiguration
- 9.36. Hauptprogramm-Konfiguration
- 9.37. Roboterschweißen von Durchdringungskurven mit Erweiterungsachse
- 9.38. PrintMsg()-Druckfunktion des Roboter-LUA-Programms
- 10. Graphische Programmierung
- 10.1. Einführung
- 10.2. Logische grafische Programmierbefehle
- 10.3. Grafische Programmierbefehle für Variablen
- 10.4. Grafische Programmierbefehle für Funktionen
- 10.5. Grafische Programmierbefehle für Bewegungen
- 10.5.1. Punkt-zu-Punkt-Anweisung
- 10.5.2. Linear-Anweisung
- 10.5.3. Linear (Winkelgeschwindigkeit am Übergangspunkt einstellbar) Anweisung
- 10.5.4. Linear (seamPos) Anweisung
- 10.5.5. Kreisbogen-Anweisung
- 10.5.6. Vollkreis-Anweisung
- 10.5.7. Spiral-Anweisung
- 10.5.8. Neue Spiral-Anweisung
- 10.5.9. Horizontale Spiral-Anweisung
- 10.5.10. Spline-Anweisung
- 10.5.11. Neue Spline-Anweisung
- 10.5.12. Pendelanweisung
- 10.5.13. Punktversatz-Anweisung
- 10.5.14. Servoanweisung
- 10.5.15. Bahn-Anweisung
- 10.5.16. Bahn-J-Anweisung
- 10.5.17. Bahnreproduktions-Anweisung
- 10.5.18. DMP-Anweisung
- 10.5.19. Werkzeugwechsel-Anweisung
- 10.5.20. Werkstückwechsel-Anweisung
- 10.6. Steuerungsbezogene grafische Programmierbefehle
- 10.6.1. Warten-Anweisung
- 10.6.2. Moduswechsel-Anweisung
- 10.6.3. Pause-Anweisung
- 10.6.4. Koordinatensystem-Anweisungen
- 10.6.5. Simulierte AI-Anweisungen
- 10.6.6. Digitale IO-Anweisungen
- 10.6.7. Bewegungs-DO-Anweisung
- 10.6.8. Bewegungs-AO-Anweisung
- 10.6.9. Kollisionsstufen-Anweisung
- 10.6.10. Beschleunigungs-Anweisung
- 10.7. Grafische Programmierbefehle für Peripheriegeräte
- 10.8. Grafische Programmierbefehle für Schweißen
- 10.9. Grafische Programmierbefehle für Kraftsteuerung
- 10.10. Grafische Programmierbefehle für Kommunikation
- 10.11. Grafische Programmierbefehle für Fortgeschrittene
- 10.12. Beispiel für die Verwendung grafischer Programmierbefehle
- 11. Node-Editor-Programmierung
- 11.1. Basisinformationen
- 11.2. Node-Editor-Bedienung
- 11.3. If/Else-Entscheidungsbefehl
- 11.4. While-Befehl
- 11.5. Sprungbefehl
- 11.6. Wartebefehl
- 11.7. Pausenbefehl
- 11.8. Unterprogramm-Aufrufbefehl
- 11.9. Systemvariable setzen Befehl
- 11.10. Punkt-zu-Punkt-Befehl
- 11.11. Lin-Befehl
- 11.12. Lin(seamPos)-Befehl
- 11.13. Kreisbogen-Befehl
- 11.14. Kreis-Befehl
- 11.15. Spiral-Befehl
- 11.16. Neuer Spiral-Befehl
- 11.17. Horizontal-Spiral-Befehl
- 11.18. Spline-Befehl
- 11.19. Neuer Spline-Befehl
- 11.20. Pendel-Befehl
- 11.21. Bahnreproduktions-Befehl
- 11.22. Punktversatz-Befehl
- 11.23. Servo-Befehl
- 11.24. Bahn-Befehl
- 11.25. BahnJ-Befehl
- 11.26. DMP-Befehl
- 11.27. Werkstücktransformations-Befehl
- 11.28. Werkzeugtransformations-Befehl
- 11.29. Digital-IO-Befehlsknoten
- 11.30. Analog-AI-Befehl
- 11.31. Virtueller-IO-Befehlsknoten
- 11.32. Erweiterungs-IO-Befehlsknoten
- 11.33. Bewegungs-DO-Befehl
- 11.34. Koordinatensystem-Befehl
- 11.35. Moduswechsel-Befehl
- 11.36. Kollisionsstufen-Befehl
- 11.37. Beschleunigungs-Befehl
- 11.38. Greifer-Befehl
- 11.39. Spritzpistolen-Befehl
- 11.40. Erweiterungsachsen-Befehl (Steuerung + SPS)
- 11.41. Erweiterungsachsen-Befehl (Steuerung + Servoantrieb)
- 11.42. Förderband-Befehl
- 11.43. Schleifbefehl
- 11.44. Schweißbefehl
- 11.45. Intervallschweiß-Befehl
- 11.46. Lasertracking-Befehl
- 11.47. Laseraufzeichnungs-Befehl
- 11.48. Schweißdraht-Positionssuchbefehl
- 11.49. Lichtbogen-Tracking-Befehl
- 11.50. Posenanpassungs-Befehl
- 11.51. Kraftregelungsbefehl
- 11.52. Drehmomentaufzeichnungs-Befehl
- 11.53. Modbus-Befehl
- 11.54. Anwendungsbeispiel
- 12. Teachpunkte
- 13. Statusinformationen
- 14. Werkzeuganwendungen
- 14.1. Roboter verpacken
- 14.2. Datensicherung
- 14.3. 10-Sekunden-Datenaufzeichnung
- 14.4. Endeffektor-LED
- 14.5. Drag-Sperre (Freiheitsgradsperre)
- 14.5.1. Normale Auslösung des Kollisionsschutzes bei kraftunterstütztem Ziehen
- 14.5.1.1. Übersicht
- 14.5.1.2. Kollisionsschutz
- 14.5.1.3. Parametrierung des Gelenkmomentsensors am Gesamtroboter
- 14.5.1.4. Kraftschätzung und Drehmomentkompensation basierend auf Momentum-Beobachter
- 14.5.1.5. Optimierte Zugunterstützung basierend auf Gelenkmomentsensoren
- 14.5.1. Normale Auslösung des Kollisionsschutzes bei kraftunterstütztem Ziehen
- 14.6. Schnittpunktgenerierung (Lasertracking-Punktbewegung)
- 14.7. Peripherieprotokolle
- 14.8. G-Code zu Roboterbahnplanungsfunktion
- 15. Prozesspakete
- 15.1. Schweißexpertenbibliothek
- 15.2. Palettiersystem-Konfiguration
- 15.3. Förderbandverfolgung
- 15.3.1. Schritte zur Förderbandverfolgungskonfiguration
- 15.3.2. Förderbandverfolgungs-Teach-Programm
- 15.3.3. Aufbau des Roboter-Förderbandverfolgungssystems
- 15.3.3.1. Verbindungsart der Förderband-Encoder-Datenkommunikation
- 15.3.3.2. Förderbandkonfiguration
- 15.3.3.3. Konfiguration des Verfolgungskoordinatensystems
- 15.3.3.4. Funktion der Förderbandverfolgungs-Nachholbewegung
- 15.3.3.5. Kurzeinführung zur Funktion der Förderbandverfolgungs-Nachholbewegung
- 15.3.3.6. Anfahren eines Nachholbewegungsprogramms
- 15.4. Optimierungsfunktion der Matrixbewegungsanweisung
- 16. Systemeinstellungen
- 16.1. Allgemeine Einstellungen
- 16.2. Kontoeinstellungen
- 16.3. Über
- 16.4. Benutzerdefinierte Informationen
- 16.5. Robotermodell-Konfiguration
- 17. Teachpendant
- 18. Fernbedienungsmodus des Roboters
- 19. Roboter-Slave-Modus
- 20. Anhang
- 21. Glossar
Versionshinweise
- Version V3.9.7
- Version V3.9.6
- Version V3.9.5
- Version V3.9.4
- Version V3.9.3
- Version V3.9.2
- Version V3.9.1
- Version V3.9.0
- Version V3.8.7
- Version V3.8.6
- Version V3.8.5
- Version V3.8.4.1
- Version V3.8.4
- Version V3.8.3
- Version V3.8.2
- Version V3.8.1
- Version V3.8.0
- Version V3.7.8
- Version V3.7.7
- Version V3.7.6
- Version V3.7.5
- Version V3.7.4
- Version V3.7.3
- Version V3.7.2
- Version V3.7.1