2. WebApp Zugriff und Anmeldung
2.1. Aufrufen der WebApp-Anmeldeschnittstelle
Schalten Sie das Steuerpult ein und verbinden Sie es per Netzwerkkabel mit einem PC.
Öffnen Sie auf dem PC den Chrome-Browser und rufen Sie die Ziel-IP-Adresse 192.168.58.2 auf.
Geben Sie Benutzernamen und Passwort ein und klicken Sie auf „Anmelden“, um sich in der WebApp anzumelden.
Der initiale Benutzername ist „admin“, das Passwort „123“.
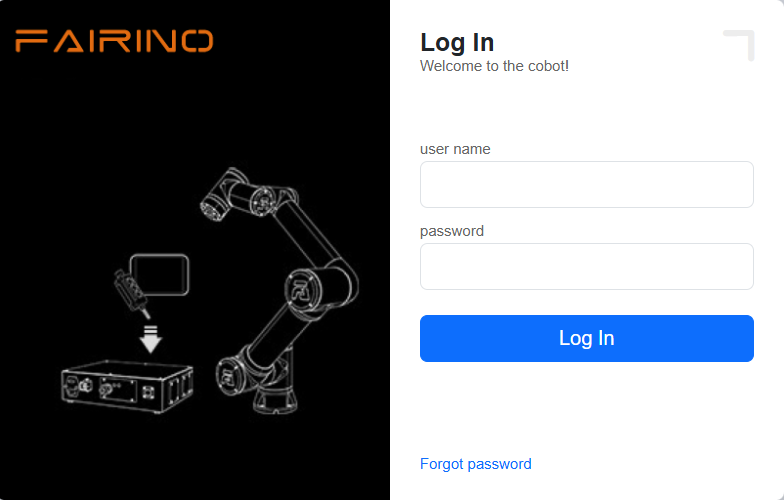
Abbildung 2.1‑1 Anmeldeoberfläche
2.2. Einführung in die WebApp-Oberfläche
Nach erfolgreicher Anmeldung gelangt das System in die „Startoberfläche“. Diese enthält hauptsächlich:
FAIRINO Logo;
Schaltfläche zum Ein-/Ausblenden der Menüleiste;
Menüleiste;
Roboter-Steuerungsbereich;
Roboter-Statusbereich;
3D-Roboter-Simulation – 3D-Szenenbedienung;
3D-Roboter-Simulation – Bedienung des Roboterarms;
Zusatzfunktionen des Roboters;
Status des Roboters und der Zusatzfunktionen.
Die folgende Abbildung zeigt die schematische Darstellung der System-Startoberfläche:
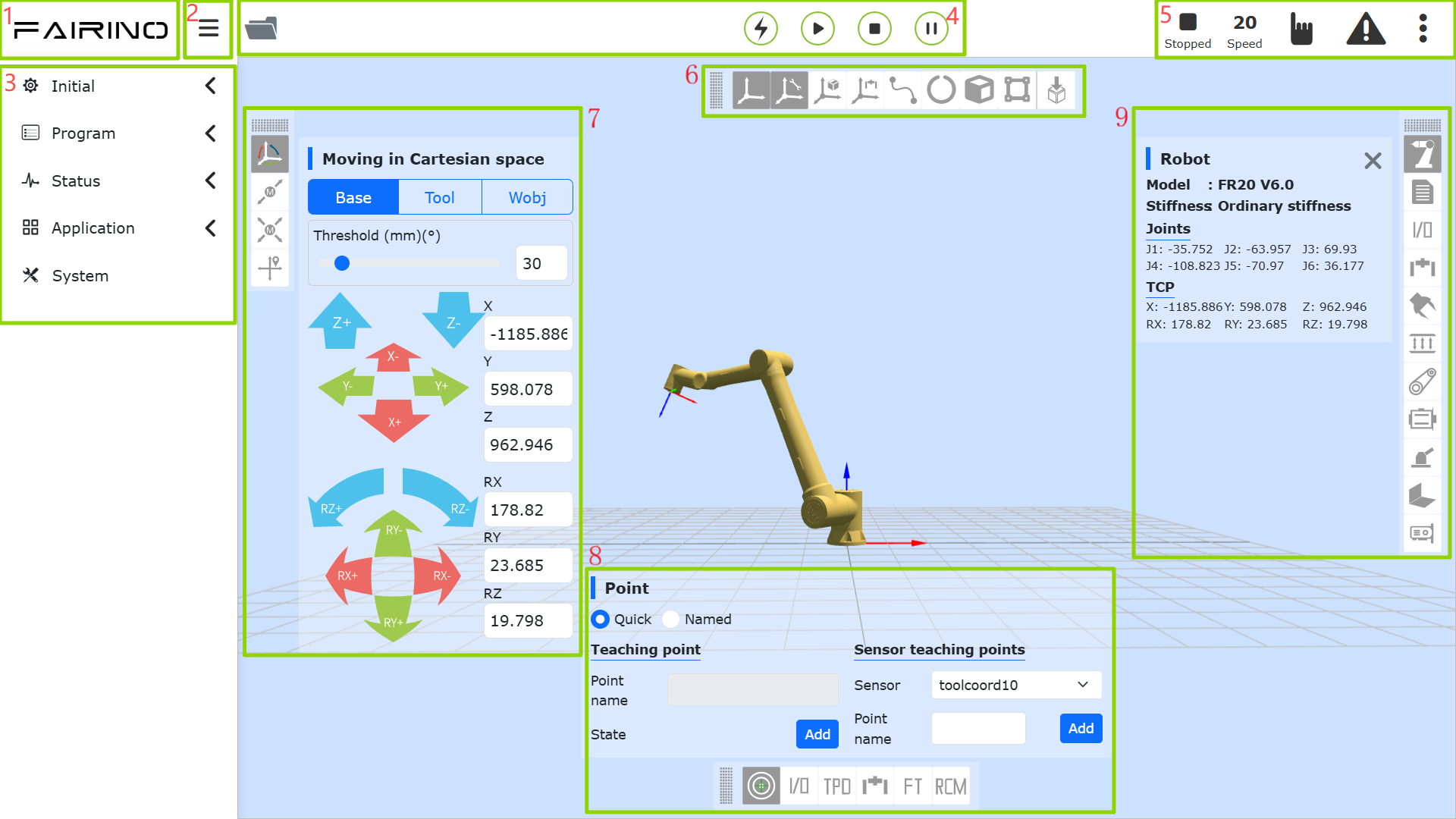
Abbildung 2.2‑1 Schematische Darstellung der System-Startoberfläche
2.2.1. Steuerungsbereich
Bemerkung

Bezeichnung: Schaltfläche „Teach-Programm öffnen“
Funktion: Öffnet ein Teach-Programm für die Programmierung, grafische Programmierung oder Knotenpunkt-Programmierung.
Bemerkung

Bezeichnung: Schaltfläche „Enable“ (Freigabe)
Funktion: Aktiviert den Roboter (Einschalten der Motoren).
Bemerkung

Bezeichnung: Schaltfläche „Start“
Funktion: Lädt das Teach-Programm hoch und startet dessen Ausführung.
Bemerkung

Bezeichnung: Schaltfläche „Stopp“
Funktion: Stoppt die Ausführung des aktuellen Teach-Programms.
Bemerkung

Bezeichnung: Schaltfläche „Pause/Fortsetzen“
Funktion: Pausiert und setzt das aktuelle Teach-Programm fort.
Wichtig
Ein Pause-Befehl am Ende des Programms kann nicht verarbeitet werden.
2.2.2. Statusleiste
Bemerkung

Bezeichnung: Roboter-Fehlerstatus
Funktion: Zeigt an, dass aktuell ein Fehler im Roboterbetrieb vorliegt. Bei keinem Fehler ausgeblendet.
Bemerkung

Bezeichnung: Roboterstatus
Funktion: Stopped – Gestoppt, Running – Läuft, Pause – Pausiert, Drag – Manuelles Führen (Drag & Teach).
Bemerkung

Bezeichnung: Roboter-Werkzeugkoordinatensystem, Werkstückkoordinatensystem, erweitertes Achskoordinatensystem und Lastkennung
Funktion: Oben links – Aktuelle Werkzeugkoordinatensystem-Nummer, oben rechts – Aktuelle Werkstückkoordinatensystem-Nummer, unten links – Aktuelle Nummer des erweiterten Achskoordinatensystems, unten rechts – Aktuelle Lastkennung.
Bemerkung

Bezeichnung: Geschwindigkeitsprozentsatz
Funktion: Aktuelle Betriebsgeschwindigkeit des Roboters im jeweiligen Modus (in Prozent).
Bemerkung

Bezeichnung: Automatikmodus
Funktion: Automatischer Betriebsmodus des Roboters. Wenn beim Wechsel von Hand- zu Automatikmodus die Globale Geschwindigkeit angepasst werden soll, wird die globale Geschwindigkeit automatisch auf den angegebenen Wert gesetzt.
Bemerkung

Bezeichnung: Handmodus
Funktion: Manueller Modus des Roboters zum Teach-In (Programmieren durch Vorführen).
Bemerkung

Bezeichnung: Schaltfläche zum Ein-/Ausklappen des Roboterstatus
Funktion: Klappt die Anzeige für Werkzeugkoordinatensystem, Werkstückkoordinatensystem, erweitertes Achskoordinatensystem, Last, Roboterschleppmodus, Lokal/Fern-Modus, Roboter-Verbindungsstatus, BOOT-Modus und Kontoinformationen ein oder aus.
Durch Klicken auf die Ausklapp-Schaltfläche werden die folgenden zusätzlichen Statusinformationen angezeigt.
Bemerkung

Bezeichnung: Werkzeugkoordinatensystem-Nummer
Funktion: Zeigt die Nummer des aktuell verwendeten Werkzeugkoordinatensystems an.
Bemerkung

Bezeichnung: Werkstückkoordinatensystem-Nummer
Funktion: Zeigt die Nummer des aktuell verwendeten Werkstückkoordinatensystems an.
Bemerkung

Bezeichnung: Erweitertes Achskoordinatensystem - Nummer
Funktion: Zeigt die Nummer des aktuell verwendeten erweiterten Achskoordinatensystems an.
Bemerkung

Bezeichnung: Last
Funktion: Zeigt das aktuell verwendete Lastgewicht und den Schwerpunkt (Koordinaten X, Y, Z) an.
Bemerkung

Bezeichnung: Roboter-Schleppmodus-Status
Funktion: Der Roboter kann manuell geführt werden (Drag & Teach).
Bemerkung

Bezeichnung: Roboter-Schleppmodus-Status
Funktion: Der Roboter kann nicht manuell geführt werden.
Bemerkung

Bezeichnung: Roboter Lokal-Modus
Funktion: Der Roboter wird über das Steuerpult gesteuert.
Bemerkung

Bezeichnung: Roboter Fern-Modus
Funktion: Der Roboter kann nur über eine SPS gesteuert werden.
Bemerkung

Bezeichnung: Verbindungsstatus
Funktion: Roboter ist verbunden.
Bemerkung
Bezeichnung: Verbindungsstatus
Funktion: Roboter ist nicht verbunden.
Bemerkung

Bezeichnung: Kontoinformationen
Funktion: Zeigt Benutzername, Berechtigungen und bietet die Möglichkeit zum Abmelden.