5. Schnellprogrammierung des Roboters
5.1. Einführung in einfache Bewegungsbefehle
PTP-Befehl: Klicken Sie auf das Symbol „Punkt-zu-Punkt“, um die Bearbeitungsoberfläche für den PTP-Befehl zu öffnen.
Sie können den zu erreichenden Punkt auswählen. Durch die Einstellung der Glättungsübergangszeit kann die Bewegung von diesem Punkt zum nächsten kontinuierlich erfolgen. Bei der Einstellung „Ob Versatz“ können Sie einen Versatz basierend auf dem Basiskoordinatensystem oder dem Werkzeugkoordinatensystem auswählen. Es öffnen sich dann Eingabefelder für den Versatz in x, y, z, rx, ry, rz. Der spezifische PTP-Pfad ist der optimale Pfad, der automatisch vom Bewegungscontroller geplant wird. Klicken Sie auf „Hinzufügen“ und dann auf „Übernehmen“, um diesen Befehl zu speichern.
Abbildung 5.1‑1 PTP-Befehls-Oberfläche
Lin-Befehl: Klicken Sie auf das Symbol „Linie“, um die Bearbeitungsoberfläche für den Lin-Befehl zu öffnen.
Die Funktion dieses Befehls ähnelt der des „PTP“-Befehls, jedoch ist der Pfad zum Zielpunkt eine gerade Linie.
Abbildung 5.1‑2 Lin-Befehls-Oberfläche
5.2. Arbeiten mit Programmdateien
Verwenden Sie die Werkzeugleiste am oberen Rand des Programmbaums, um diesen zu bearbeiten.
Bemerkung

Bezeichnung: Öffnen
Funktion: Öffnet eine Benutzerprogrammdatei.
Bemerkung

Bezeichnung: Neu
Funktion: Wählt eine Vorlage aus, um eine neue Programmdatei zu erstellen.
Bemerkung

Bezeichnung: Importieren
Funktion: Importiert eine Datei in den Benutzerprogramm-Ordner.
Bemerkung

Bezeichnung: Exportieren
Funktion: Exportiert eine Benutzerprogrammdatei auf den lokalen Computer.
Bemerkung

Bezeichnung: Speichern
Funktion: Speichert den bearbeiteten Inhalt der Datei.
Bemerkung

Bezeichnung: Speichern unter
Funktion: Benennt die Datei um und speichert sie im Ordner für Benutzerprogramme oder Vorlagen.
Bemerkung

Bezeichnung: Kopieren
Funktion: Kopiert einen Knoten und ermöglicht seine Verwendung für andere Operationen (z. B. Einfügen an einer anderen Stelle im Programmbaum).
Bemerkung

Bezeichnung: Einfügen
Funktion: Ermöglicht das Einfügen eines zuvor ausgeschnittenen oder kopierten Knotens.
Bemerkung

Bezeichnung: Ausschneiden
Funktion: Schneidet einen Knoten aus und ermöglicht seine Verwendung für andere Operationen (z. B. Einfügen an einer anderen Stelle im Programmbaum).
Bemerkung

Bezeichnung: Löschen
Funktion: Entfernt einen Knoten aus dem Programmbaum.
Bemerkung

Bezeichnung: Nach oben
Funktion: Verschiebt den Knoten nach oben.
Bemerkung

Bezeichnung: Nach unten
Funktion: Verschiebt den Knoten nach unten.
Bemerkung
Bezeichnung: Edit-Modus wechseln
Funktion: Wechselt zwischen Programmbaum-Modus und Lua-Editier-Modus.
5.3. Schreiben und Ausführen eines Programms
Auf der linken Seite können hauptsächlich Programmbefehle hinzugefügt werden. Klicken Sie auf das Symbol über den jeweiligen Schlüsselwörtern, um auf der rechten Seite die detaillierte Oberfläche zum Hinzufügen von Programmbefehlen zu öffnen. Es gibt hauptsächlich zwei Methoden, um Programmbefehle zu einer Datei hinzuzufügen:
Öffnen Sie den entsprechenden Befehl und klicken Sie auf „Übernehmen“, um den Befehl zum Programm hinzuzufügen.
Klicken Sie zuerst auf die Schaltfläche „Hinzufügen“. Der Befehl wird zu diesem Zeitpunkt noch nicht in der Programmdatei gespeichert. Klicken Sie dann auf „Übernehmen“, um den Befehl in der Datei zu speichern.
Die zweite Methode wird häufig verwendet, wenn mehrere Befehle desselben Typs gesendet werden. Für diese Art von Befehlen wurde die Schaltfläche „Hinzufügen“ und eine Funktion zur Anzeige der hinzugefügten Befehle implementiert. Durch Klicken auf „Hinzufügen“ kann ein Befehl hinzugefügt werden. „Hinzugefügte Befehle“ zeigt alle hinzugefügten Befehle an. Durch Klicken auf „Übernehmen“ werden die hinzugefügten Befehle in der rechts geöffneten Datei gespeichert.
Klicken Sie auf die Starttaste, um das Programm auszuführen; klicken Sie auf die Stopptaste, um die Programmausführung zu stoppen; klicken Sie auf die Pause/Fortsetzen-Taste, um das Programm zu pausieren/fortzusetzen. Während der Programmausführung wird der aktuell ausgeführte Programmknoten grün hervorgehoben.
Im Handmodus können Sie durch Klicken auf das erste Symbol rechts neben einem Knoten den Roboter diesen Befehl einzeln ausführen lassen. Das zweite Symbol dient zum Bearbeiten des Knoteninhalts.
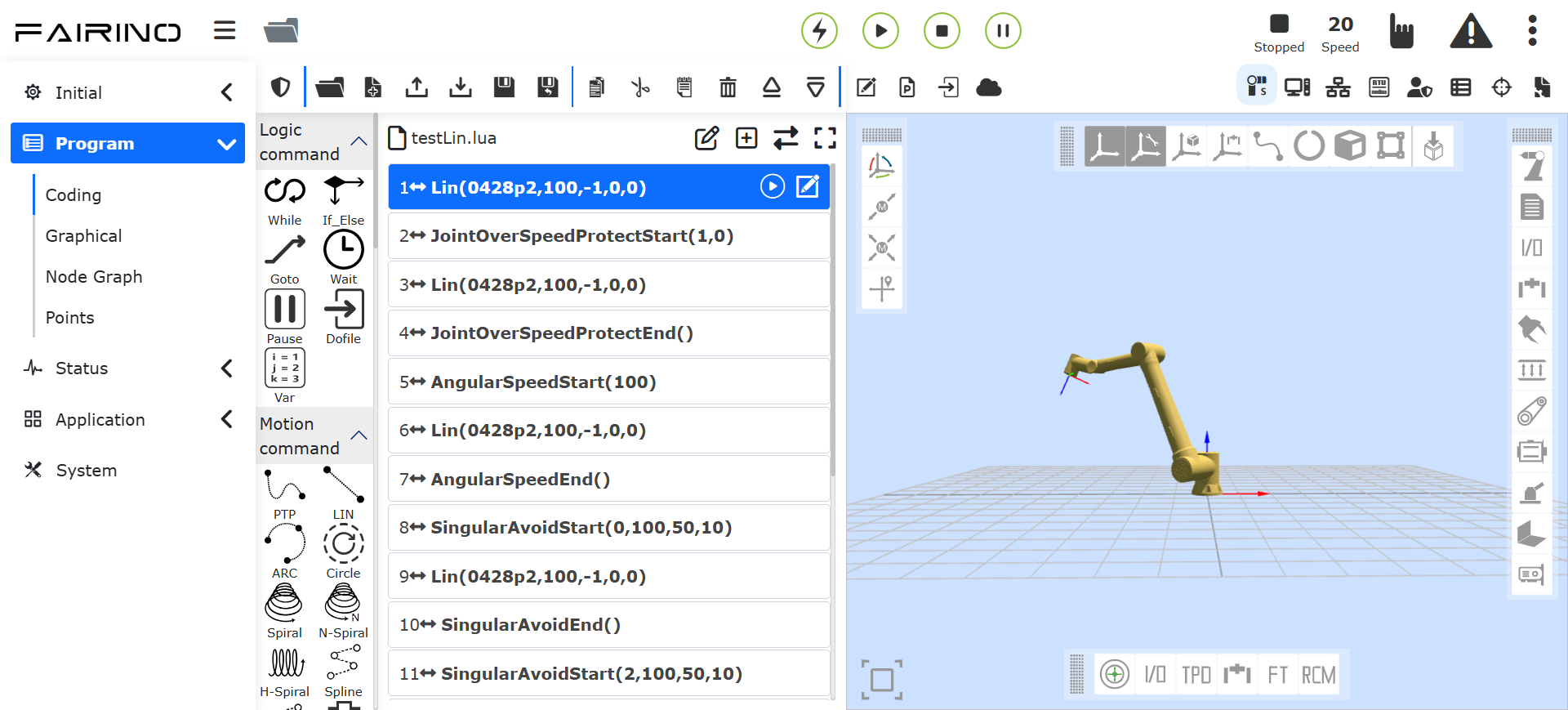
Abbildung 5.3‑1 Programmbaum-Oberfläche