7. Sicherheit
7.1. Sicherheitsstopp
Klicken Sie in der Menüleiste auf „Initiale Einstellungen“ -> „Sicherheit“. Klicken Sie auf das Untermenü „Sicherheitsstopp“, um zur Konfigurationsoberfläche zu gelangen. Hier stellen Sie den Sicherheitsstopp-Modus und die Parameter der Sicherheitsstopp-Strategie ein.
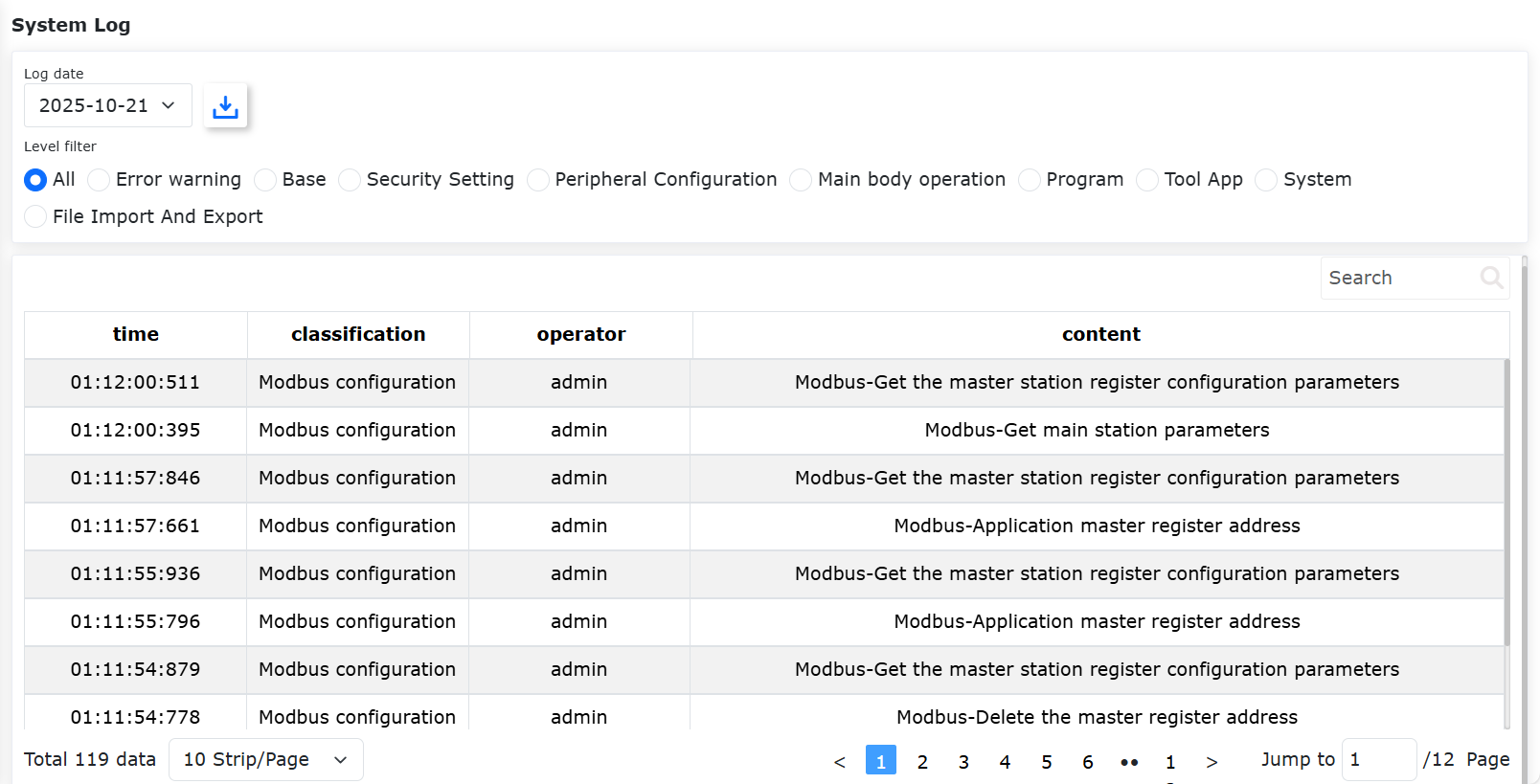
Abbildung 7.1-1 Sicherheitsstopp-Konfiguration
7.1.1. Sicherheitsstopp mit Zweikanal + Reduziertem Modus konfigurierbar
7.1.1.1. Überblick
Wenn die Auslöseart des Sicherheitsstopps auf „Zweikanal“ eingestellt ist, muss der Zustand über beide Kanäle gelöscht sein und der Benutzer muss die Warnung auf der Bedienoberfläche manuell quittieren, bevor der Roboter zurückgesetzt werden kann. Zusätzlich wurde in der Strategiekonfiguration die Option „Reduzierter Modus“ hinzugefügt. Wenn der Benutzer diese Strategie wählt, wechselt der Roboter in den reduzierten Bewegungsmodus.
7.1.1.2. Vorgehen
Schritt 1: Klicken Sie auf „Initiale Einstellungen“ -> „Sicherheit“ -> „Sicherheitsstopp“. Die Auslöseart kann als „Standard“ oder „Zweikanal“ gewählt werden. Der Unterschied besteht darin: Im „Standard“-Modus wird die Fehlermeldung auf der Oberfläche nach dem Auslösen und Wiederherstellen automatisch gelöscht. Im „Zweikanal“-Modus muss die Fehlermeldung auf der Oberfläche nach dem Auslösen und Wiederherstellen manuell gelöscht werden. Die „Sicherheitsstopp-Strategie“ kann als „Stopp“, „Pause“, „Erste Reduzierungsstufe“ oder „Zweite Reduzierungsstufe“ gewählt werden. Die genaue Bedeutung ist wie folgt: Bei Auswahl von „Stopp“ stoppt der Roboter die aktuelle Bewegung; bei „Pause“ pausiert der Roboter die aktuelle Bewegung; nach Wiederherstellung und Löschen des Fehlers wird die Bewegung fortgesetzt; bei „Erste Reduzierungsstufe“ wechselt der Roboter in die erste Reduzierungsstufe; bei „Zweite Reduzierungsstufe“ wechselt der Roboter in die zweite Reduzierungsstufe.
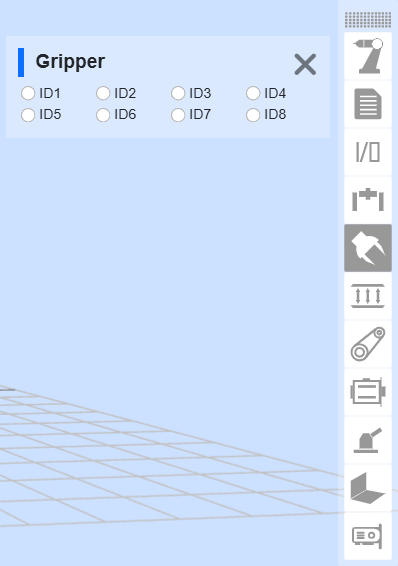
Abbildung 7.1-2 Einstellung der Sicherheitsstopp-Strategie
Schritt 2: Da bei Auswahl der Auslöseart „Standard“ die Fehlermeldung auf der Oberfläche nach der Wiederherstellung automatisch gelöscht wird, ist keine weitere Erklärung erforderlich. Daher wird hauptsächlich die Vorgehen bei Auswahl der Auslöseart „Zweikanal“ beschrieben: Nach der Wiederherstellung muss der Benutzer oben rechts auf „Löschen“ klicken, bevor der Roboter zurückgesetzt werden kann.
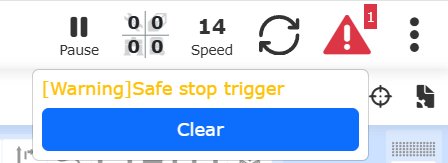
Abbildung 7.1-3 Manuelles Löschen nach Sicherheitsstopp-Auslösung
7.1.2. Sicherheitsgeschwindigkeitsbewegung
Nachdem der Roboter einen Sicherheitsstopp ausgelöst hat, kann der Benutzer in der Webapp auf eine Schaltfläche klicken, einen konfigurierbaren CI-Eingang des Steuerkastens oder einen konfigurierbaren End-DI-Eingang des Endeffektorwerkzeugs konfigurieren, um den Roboter in den Zustand der Sicherheitsgeschwindigkeitsbewegung zu versetzen. Im Zustand der Sicherheitsgeschwindigkeitsbewegung kann der Roboter mit sicherer Geschwindigkeit getastet oder in den Ziehemodus versetzt werden, um dem Benutzer die Fehlerbehebung zu erleichtern.
Klicken Sie in der Roboter-Webapp nacheinander auf „Grundeinstellungen“, „Sicherheit“, „Sicherheitsstopp“, suchen Sie auf dieser Seite „Sicherheitsgeschwindigkeitsbewegung“ und aktivieren Sie es.
Abbildung 7.1-4 Sicherheitsgeschwindigkeitsbewegung aktivieren
Wenn zu diesem Zeitpunkt ein Sicherheitsstopp ausgelöst wird, zeigt die obere rechte Ecke der Roboter-Webapp eine Warnung „Sicherheitsstopp ausgelöst“ an und zeigt die Schaltfläche „Sicherheitsgeschwindigkeitsbewegung starten“.

Abbildung 7.1-5 Popup zum Starten der Sicherheitsgeschwindigkeitsbewegung
Klicken Sie auf die Schaltfläche „Starten“, und der Roboter stoppt automatisch das Lua-Programm und wechselt in den manuellen Modus. Gleichzeitig wird die Schaltfläche „Sicherheitsgeschwindigkeitsbewegung starten“ zu „Gestartet“ aktualisiert. Zu diesem Zeitpunkt kann der Roboter über den Endeffektor-Knopf, das Tastenfeld, die Webapp usw. gesteuert werden, um in den Ziehemodus zu wechseln und den Roboter zu ziehen, oder er kann über die Webapp oder das Teach-Pendant getastet werden.
Abbildung 7.1-6 Sicherheitsgeschwindigkeitsbewegung starten
Wenn sich der Roboter in der Sicherheitsgeschwindigkeitsbewegung befindet und im kartesischen Raum getastet wird, ist die maximale Bewegungsgeschwindigkeit des Roboters die eingestellte Sicherheitsgeschwindigkeit. Wenn die aktuelle globale Geschwindigkeitseinstellung des Roboters höher ist als die Sicherheitsgeschwindigkeit, wird die Tastgeschwindigkeit des Roboters automatisch auf die Sicherheitsgeschwindigkeit reduziert. Die Sicherheitsgeschwindigkeit wird unter „Grundeinstellungen“, „Sicherheit“, „Sicherheitsgeschwindigkeit“ eingestellt.
Nachdem der Roboter sicher gestoppt wurde, kann der Roboter zusätzlich zur Steuerung über die obere rechte Ecke der Webapp auch über CI-Eingänge des Steuerkastens oder CI-Eingänge des Endeffektors in den Sicherheitsgeschwindigkeitsmodus versetzt werden. Klicken Sie in der Webapp nacheinander auf „Grundeinstellungen“, „Basis“, „I/O-Einstellungen“, „DI“. Konfigurieren Sie einen bestimmten CI-Port des Steuerkastens oder den End-DI des Endeffektorwerkzeugs als „Sicherheitsgeschwindigkeitsbewegung starten“. Nachdem ein Sicherheitsstopp ausgelöst wurde, genügt es, das Eingangssignal des konfigurierten Ports zu aktivieren, um in die Sicherheitsgeschwindigkeitsbewegung zu gelangen.
Abbildung 7.1-7 Starten der Sicherheitsgeschwindigkeitsbewegung über eine Schaltfläche
7.1.3. Sicherheitsstopp nur im Automatikmodus
Wenn der Roboter den Sicherheitsstoppmodus aktiviert hat (CR-Zertifizierung, funktionale Sicherheit) und mit einem Teach-Pendant mit Drei-Stellungen-Zustimmungsschalter verwendet wird, kann „Sicherheitsstopp nur im Automatikmodus“ aktiviert werden. Wenn das Sicherheitsstoppsignal des Roboters ausgelöst wird, kann der Roboter auf dem Teach-Pendant in den manuellen Modus geschaltet und dann im manuellen Modus getastet oder in den Ziehemodus versetzt werden, um dem Benutzer die Fehlerbehebung zu erleichtern.
Klicken Sie in der Roboter-Webapp nacheinander auf „Grundeinstellungen“, „Sicherheit“, „Sicherheitsstopp“, suchen Sie auf dieser Seite „Sicherheitsstopp nur im Automatikmodus“ und aktivieren Sie es.
Abbildung 7.1-8 Sicherheitsstopp nur im Automatikmodus aktivieren
Wenn der Roboter den Sicherheitsstoppmodus nicht aktiviert hat (CR-Zertifizierung, funktionale Sicherheit) oder kein Teach-Pendant verwendet wird, kann die Funktion „Sicherheitsstopp nur im Automatikmodus“ nicht aktiviert werden. In diesem Fall zeigt die Webapp eine Fehlermeldung an: „Sicherheitsstopp nur im Automatikmodus erfordert den Drei-Stellungen-Zustimmungsschalter am Teach-Pendant“. Wenn der Sicherheitsstoppmodus oder das Teach-Pendant deaktiviert wird, wird die Funktion „Sicherheitsstopp nur im Automatikmodus“ ebenfalls automatisch deaktiviert.
Abbildung 7.1-9 Fehler beim Aktivieren des Sicherheitsstopps nur im Automatikmodus
7.2. Sicherheitsgeschwindigkeit
Klicken Sie in der Menüleiste auf „Initiale Einstellungen“ -> „Sicherheit“. Klicken Sie auf das Untermenü „Sicherheitsgeschwindigkeit“, um zur Konfigurationsoberfläche zu gelangen und die Sicherheitsgeschwindigkeit einzustellen.
Bemerkung
TCP-Handgeschwindigkeit unter 250 mm/s.
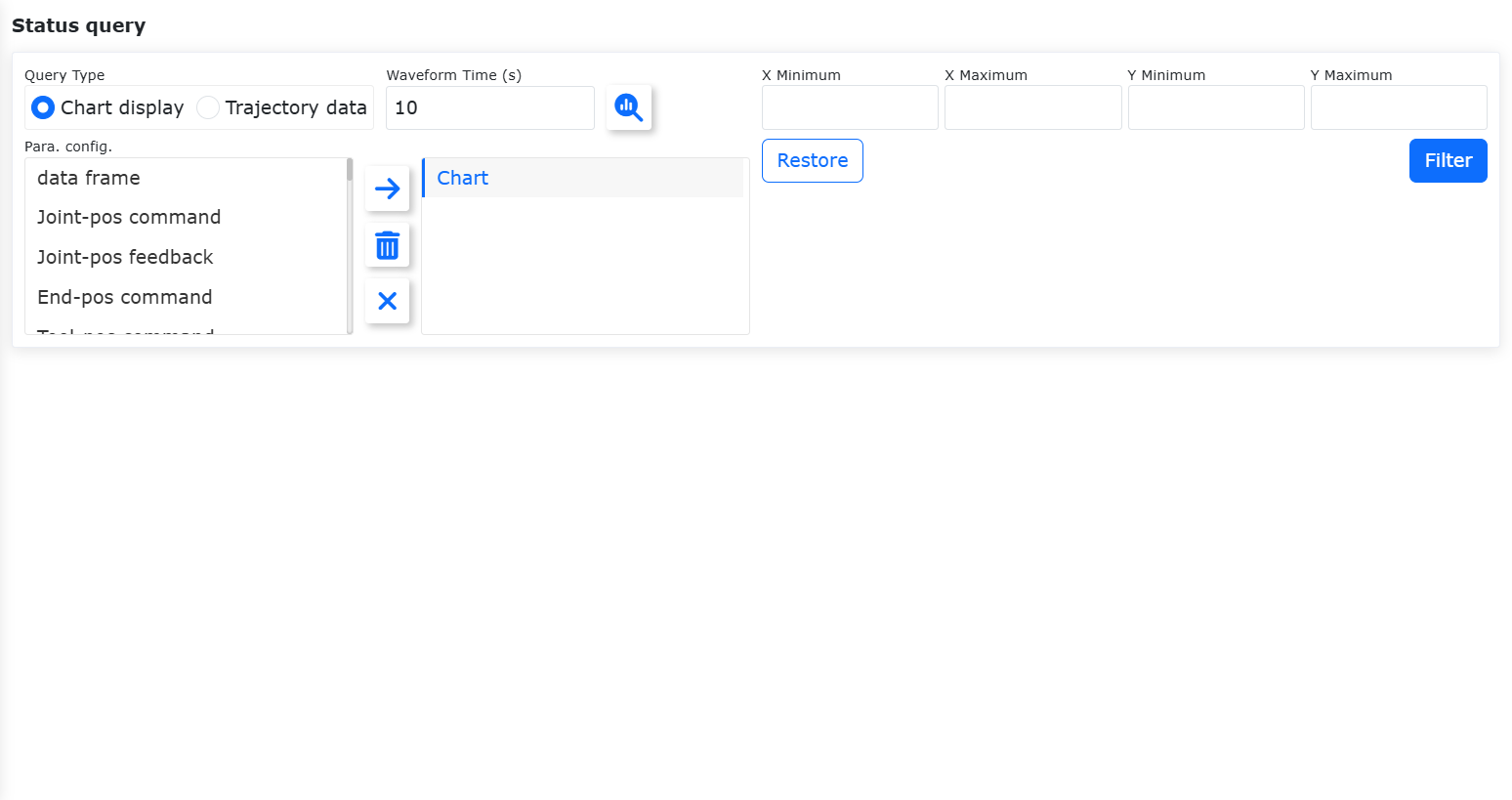
Abbildung 7.2-1 Konfiguration der sicheren Handgeschwindigkeit
7.2.1. Sicherheitsgeschwindigkeitsfunktion
7.2.1.1. Überblick
Die Sicherheitsgeschwindigkeitsfunktion des Roboters dient der Mensch-Roboter-Kollaboration oder dynamischen Umgebungen. Sie begrenzt aktiv die Betriebsgeschwindigkeit des Roboters, um kinetische Energie und Aufprallkräfte innerhalb sicherer Schwellenwerte zu halten, wodurch Verletzungen von Personen bei versehentlichem Kontakt verhindert und Geräte sowie Werkstücke wirksam vor Kollisionsschäden geschützt werden.
7.2.1.2. Ablauf
Schritt 1: Klicken Sie auf die Schaltfläche „Grundeinstellungen“ - „Sicherheit“ - „Sicherheitsgeschwindigkeit“, um die Parameter für die Sicherheitsgeschwindigkeit einzustellen. Die Konfiguration umfasst hauptsächlich drei Teile: „Funktionsaktivierung“, „Geschwindigkeitsbegrenzung“ und „Modus nach Überschreitung“.
Bei der „Funktionsaktivierung“ können drei Optionen ausgewählt werden: „Deaktiviert“, „Im manuellen Modus aktiviert“ und „In allen Modi aktiviert“;
Stellen Sie die Geschwindigkeitsbegrenzung im Feld „Geschwindigkeitsbegrenzung“ ein. Wenn die Lineargeschwindigkeit des Roboters diese Grenze erreicht, wird sie gemäß den in „Modus nach Überschreitung“ eingestellten Parametern behandelt. „Modus nach Überschreitung“ bietet drei Modi: „Stopp mit Alarm“, „Automatische Geschwindigkeitsbegrenzung“ und „Deaktivieren nach Stopp mit Alarm“. Die automatische Geschwindigkeitsbegrenzung ist nur verfügbar, wenn „Im manuellen Modus aktiviert“ ausgewählt ist.
Nachdem die erforderlichen Parameter eingestellt wurden, sind keine weiteren Aktionen erforderlich. Die Bewegung des Roboters wird gemäß den eingestellten Parametern behandelt. Die Parametereinstellungen sind in der Abbildung dargestellt.
Abbildung 7.2-2 Sicherheitsgeschwindigkeits-Parametereinstellung
7.3. I/O-Sicherheit
Klicken Sie in der Menüleiste auf „Initiale Einstellungen“ -> „Sicherheit“. Klicken Sie auf das Untermenü „I/O-Sicherheit“, um zur Konfigurationsoberfläche zu gelangen.
Das HMI ermöglicht die Einstellung des Sicherheitszustands für 16 digitale Eingänge und 16 digitale Ausgänge. Diese können auf „Aktiv“ oder „Inaktiv“ gesetzt werden. Wenn die Steuerung einen Sicherheitszustand erkennt, werden die 16 digitalen Eingänge und 16 digitalen Ausgänge in den eingestellten Sicherheitszustand versetzt.
Abbildung 7.3-1 Konfiguration des I/O-Sicherheitszustands
- Unter dem LA-System:
„I/O-Sicherheit“ bietet eine DIO-Sicherheitsfunktion. Die Sicherheitsfunktion verwendet zwei DI oder DO. Wenn ein sicheres DI-Signal oder ein Sicherheitszustandsflag ausgelöst wird, wird das DO ausgegeben.
Abbildung 7.3-2 Konfiguration der I/O-Sicherheitsfunktion
7.4. Not-Halt-Stopp
Klicken Sie in der Menüleiste auf „Initiale Einstellungen“ -> „Sicherheit“. Klicken Sie auf das Untermenü „Not-Halt-Stopp“, um zur Konfigurationsoberfläche zu gelangen.
Die Not-Halt-Stopp-Typen 0, 1a, 1b, 2 sind einstellbar. Die Stoppzeitbegrenzung und die Stoppdistanzbegrenzung sind einstellbar.
Bei Not-Halt-Stopp Typ 0 wird die Steuerschrankplatine direkt stromlos geschaltet.
Bei Not-Halt-Stopp Typ 1a wird nach einem Verzögerungsstopp die Spannungsversorgung des Roboters unterbrochen.
Bei Not-Halt-Stopp Typ 1b wird nach einem Verzögerungsstopp die Spannungsversorgung des Roboters nicht unterbrochen, der Roboter wird jedoch deaktiviert (Enable entfernt).
Not-Halt-Stopp Typ 2 bedeutet: Bei Betätigung des Not-Halts stoppt der Roboter verzögert und bleibt aktiviert. Nach dem Lösen des Not-Halts kann der Roboter normal weiterlaufen.
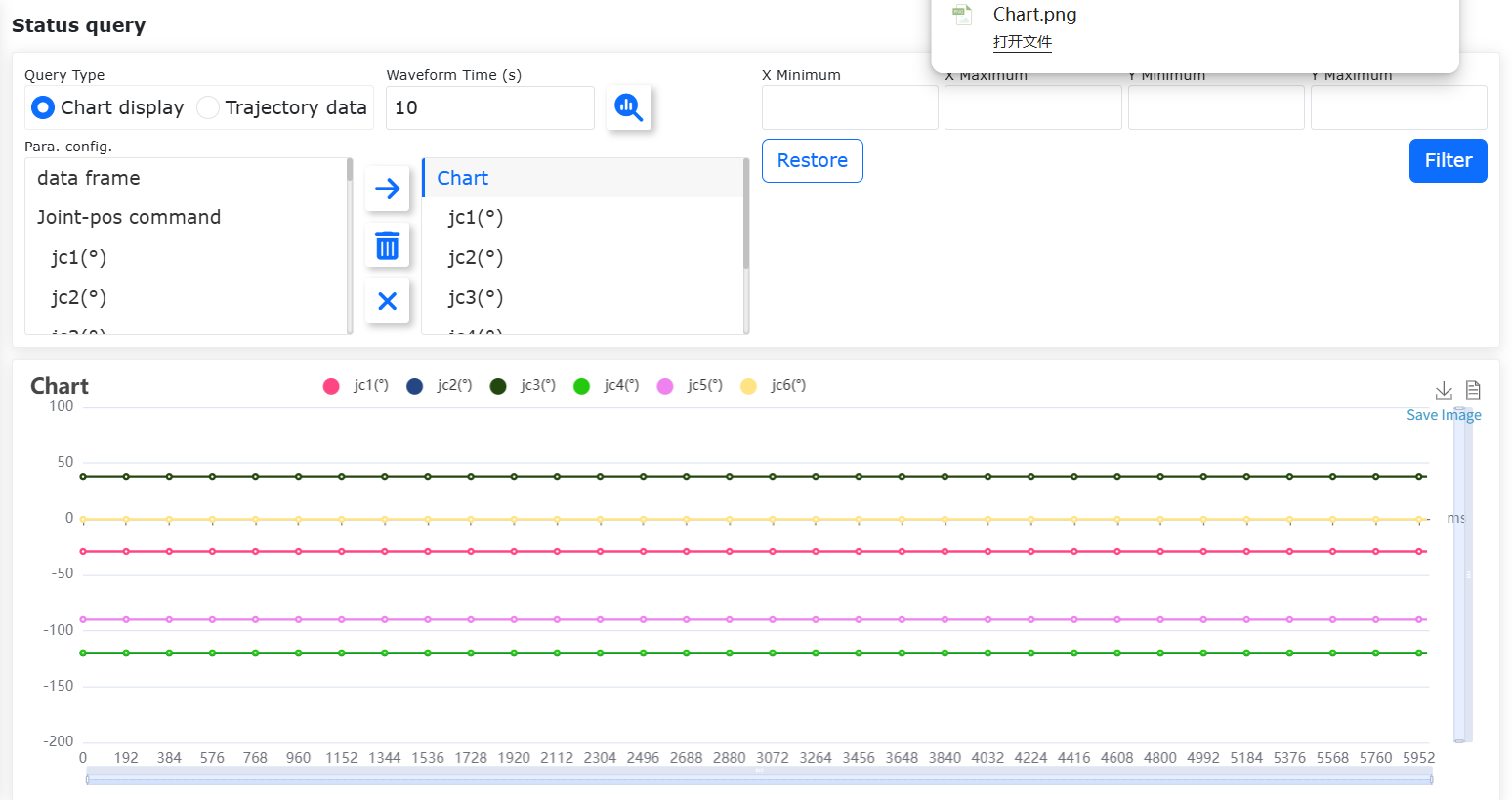
Abbildung 7.4-1 Not-Halt-Stopp-Konfiguration
7.4.1. Optionale automatische Aktivierung (Enable) nach Sicherheitsstopp-Wiederherstellung
7.4.1.1. Überblick
Nach einem Not-Halt-Stopp vom Typ 1b bietet der Roboter zwei Modi zur Auswahl: manuelle Aktivierung und automatische Aktivierung. Bei Auswahl der manuellen Aktivierung muss der Benutzer nach dem Lösen des Not-Halt-Tasters den Robotermodus auf Automatik stellen und manuell die Aktivierungstaste drücken, um den Roboter zu aktivieren. Bei Auswahl der automatischen Aktivierung wird der Roboter nach dem Lösen des Not-Halt-Tasters automatisch aktiviert.
7.4.1.2. Vorgehen
Schritt 1: Klicken Sie auf „Initiale Einstellungen“ -> „Sicherheit“ -> „Not-Halt-Stopp“. Wählen Sie den „Stopp-Typ“ als „Typ 1b“. Stellen Sie die Parameter „Stoppzeitbegrenzung“ und „Stoppdistanzbegrenzung“ nach Bedarf ein. Die „Aktivierungsstrategie nach Not-Halt-Reset“ kann als „Manuelle Aktivierung“ oder „Automatische Aktivierung“ gewählt werden.
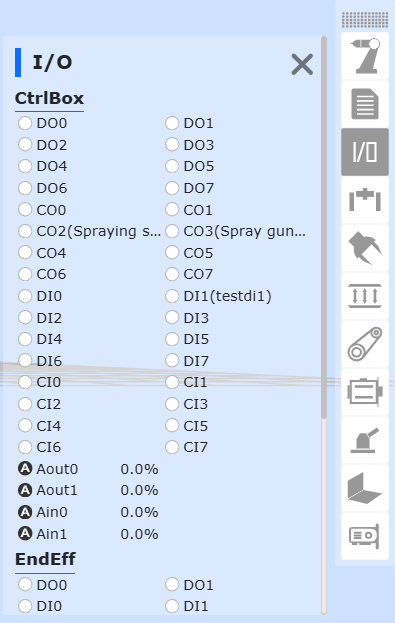
Abbildung 7.4-2 Einstellung der Aktivierungsstrategie
Schritt 2: Bei Auswahl von „Automatische Aktivierung“ wird der Roboter nach dem Lösen des Not-Halt-Tasters automatisch aktiviert. Bei Auswahl von „Manuelle Aktivierung“ muss der Benutzer nach dem Lösen des Not-Halt-Tasters im Automatikmodus manuell die Aktivierungstaste drücken, um den Roboter zu aktivieren.
Abbildung 7.4-3 Manuelle Aktivierung
7.5. Schutzhalt
Klicken Sie in der Menüleiste auf „Initiale Einstellungen“ -> „Sicherheit“. Klicken Sie auf das Untermenü „Schutzhalt“, um zur Konfigurationsoberfläche zu gelangen.
Schutzhalt-Typen 0, 1, 2. Bei Schutzhalt Typ 0 wird die Steuerschrankplatine direkt stromlos geschaltet. Bei Schutzhalt Typ 1 fordert die Steuerschrankplatine die Steuerung auf, den Roboter kontrolliert anzuhalten; danach meldet die Steuerung der Steuerschrankplatine, dass sie stromlos geschaltet werden kann. Bei Schutzhalt Typ 2 fordert die Steuerschrankplatine die Steuerung auf, den Roboter kontrolliert anzuhalten (ohne sie stromlos zu schalten).

Abbildung 7.5-1 Schutzhalt-Konfiguration
Wichtig
Das Sicherheitsdaten-Statusflag und die Fehlermeldung der Steuerschrankplatine können über die Webseite im Bereich „Controller-Statusrückmeldung“ abgerufen werden. Wenn das Flag auf 1 gesetzt ist, erscheint in der WebAPP-Alarmstatusmeldung ein Hinweis auf eine Anomalie der Sicherheitsdaten. Nach Erhalt eines Fehlers von der Steuerschrankplatine wird die spezifische Fehlermeldung basierend auf dem Fehlercode im WebAPP-Alarmstatus angezeigt.
Abbildung 7.5-2 WebAPP-Alarmstatus
7.6. Interferenzzonen-Konfiguration
Klicken Sie im Menü „Initiale Einstellungen“ -> „Sicherheit“ -> „Interferenzzone“ auf das Untermenü „Einzeln“, um zur Funktionsoberfläche für die Interferenzzonen-Konfiguration zu gelangen.
Zuerst müssen wir die Interferenzart und das Verhalten beim Betreten der Interferenzzone konfigurieren. Die Interferenzart wird in „Achsinterferenz“ und „Quaderinterferenz“ unterteilt.
Abbildung 7.6‑1 Interferenzzonen-Arten
Über einen Schieberegler wird gesteuert, ob die Funktion aktiviert ist. Konfigurieren Sie zuerst das Bewegungsverhalten beim Betreten der Interferenzzone: „Bewegung fortsetzen“ oder „Stopp“. Konfigurieren Sie als nächstes das Verhalten im Ziehemodus beim Betreten der Interferenzzone. Je nach Bedarf kann die Strategie für den Ziehemodus beim Betreten der Zone eingestellt werden: „Ziehen uneingeschränkt“, „Impedanzrückführung“ oder „Rückkehr in den Handmodus“.

Abbildung 7.6‑2 Interferenzzonen-Konfiguration
Bei Auswahl von „Achsinterferenz“ müssen die Parameter für die Achsinterferenz konfiguriert werden. Die Erkennungsmethode kann entweder „Befehlsposition“ oder „Rückmeldeposition“ sein. Der Interferenzzonenmodus kann entweder „Interferenz innerhalb des Bereichs“ oder „Interferenz außerhalb des Bereichs“ sein. Stellen Sie als nächstes den Bereich für jedes Gelenk ein und legen Sie fest, ob der Bereich für jedes Gelenk aktiviert (enable) ist. Die Werte können eingegeben oder über das „Aktualisierungssymbol“ hinter „Minimalwert“ und „Maximalwert“ mit der aktuellen Roboterposition gefüllt werden. Klicken Sie abschließend auf „Konfigurieren“.
Abbildung 7.6‑3 Achsinterferenz-Konfiguration
Bei Auswahl von „Quaderinterferenz“ müssen die Parameter für die Quaderinterferenz konfiguriert werden. Die Erkennungsmethode kann entweder „Befehlsposition“ oder „Rückmeldeposition“ sein. Der Interferenzzonenmodus kann entweder „Interferenz innerhalb des Bereichs“ oder „Interferenz außerhalb des Bereichs“ sein. Das Referenzkoordinatensystem kann entweder „Basiskoordinate“ oder „Werkstückkoordinate“ sein, je nach tatsächlicher Verwendung. Stellen Sie als nächstes den Bereich ein. Es gibt zwei Methoden zur Bereichseinstellung. Betrachten Sie zuerst die erste Methode, die „Zwei-Punkt-Methode“. Dabei wird der Quader durch zwei diagonal gegenüberliegende Eckpunkte definiert. Die Positionen können eingegeben oder durch Anteachen des Roboters aufgezeichnet werden. Klicken Sie abschließend auf „Anwenden“.
Abbildung 7.6‑4 Quaderinterferenz-Konfiguration
Betrachten Sie nun die zweite Methode, „Mittelpunkt + Seitenlänge“. Dabei wird der Quader durch seinen Mittelpunkt und seine Seitenlängen definiert. Die Position des Mittelpunkts kann eingegeben oder durch Anteachen des Roboters aufgezeichnet werden. Klicken Sie abschließend auf „Anwenden“.
Abbildung 7.6‑5 Quaderinterferenz-Konfiguration
7.6.1. Sicherheitsrückruffunktion beim Betreten einer Achsinterferenzzone im kraftunterstützten Ziehemodus
7.6.1.1. Überblick
Die Sicherheitsrückruffunktion beim Betreten einer Achsinterferenzzone im kraftunterstützten Ziehemodus kommt zum Tragen, wenn kraftunterstütztes Ziehen und Interferenzzonen gleichzeitig aktiv sind. Wenn der Roboter in eine Interferenzzone eintritt, wechselt er automatisch in den Stromregelungs-Ziehemodus (mit Impedanzrückwirkung). Wenn der Roboter die Interferenzzone wieder verlässt, wechselt er automatisch zurück in den kraftunterstützten Ziehemodus. Dies ermöglicht verschiedene Anwendungsszenarien mit kraftunterstütztem Ziehen.
7.6.1.2. Vorgehen
7.6.1.2.1. Gelenkbegrenzungsring (Joint Limit Ring)
Schritt 1: Melden Sie sich an der Webschnittstelle an und schalten Sie den Schalter „Gelenkbegrenzungsring“ ein. Um die Robotergelenke herum erscheinen Gelenkbegrenzungsringe, wie in der folgenden Abbildung gezeigt.
Abbildung 7.6‑6 Gelenkbegrenzungsringe in der Webschnittstelle
Schritt 2: Der weiße Zeiger auf dem Gelenkbegrenzungsring repräsentiert den tatsächlichen Gelenkwinkel. Die Lücke repräsentiert die Position des Software-Endschalters (Soft-Limit) des entsprechenden Gelenks. Die Größe der Lücke im Gelenkbegrenzungsring ändert sich mit der Größe des Soft-Limits. Wenn sich das Gelenk bewegt, bleibt der Gelenkbegrenzungsring relativ zum Gelenk stationär.
7.6.1.2.2. Achsinterferenz-Konfiguration
Schritt 1: Konfigurieren und aktivieren Sie die Achsinterferenz. Klicken Sie nacheinander auf „Initiale Einstellungen“ -> „Sicherheit“ -> „Interferenzzone“ -> „Einzeln“, um zur Interferenzzonen-Konfigurationsseite zu gelangen. Klicken Sie auf die Karte „Achsinterferenz“, um zur Oberfläche zu gelangen, und aktivieren Sie den Schieberegler „Funktion aktivieren“.
Schritt 2: Sie können die „Bewegungsstrategie“ auf „Bewegung fortsetzen“ setzen. Wählen Sie die „Ziehstrategie“ als „Impedanzrückführung“ und stellen Sie die Impedanzrückführparameter ein, wie in der folgenden Abbildung gezeigt. Die Impedanzrückführparameter repräsentieren die Rückstellkraft bei der Impedanzrückführung. Je größer der Wert, desto größer die Rückstellkraft. Es wird empfohlen, den Parameter auf „5“ zu setzen.
Abbildung 7.6‑7 Achsinterferenz-Konfigurationsoberfläche
Schritt 3: Stellen Sie den Achsinterferenzbereich ein. Sie können den „Erkennungsmodus“ auf „Rückmeldeposition“ setzen. Der „Interferenzzonenmodus“ kann entweder „Interferenz innerhalb des Bereichs“ oder „Interferenz außerhalb des Bereichs“ sein. Stellen Sie die Interferenzbereiche für jedes Gelenk ein und wählen Sie „Aktivieren“, um den entsprechenden Achsinterferenzbereich einzuschalten, wie in der folgenden Abbildung gezeigt.
Abbildung 7.6‑8 Interferenzbereich-Konfigurationsoberfläche
Schritt 4: Stellen Sie den „Interferenzzonenmodus“ auf „Interferenz innerhalb des Bereichs“. In der Webschnittstelle ist der freie Bewegungsbereich auf dem Gelenkbegrenzungsring grün dargestellt, der Interferenzbereich gelb. Der Bereich, in dem sich der weiße Zeiger befindet, wird hervorgehoben, wie in der folgenden Abbildung gezeigt.
Abbildung 7.6‑9 Anzeige des Gelenkbegrenzungsrings bei „Interferenz innerhalb des Bereichs“
Schritt 5: Stellen Sie den „Interferenzzonenmodus“ auf „Interferenz außerhalb des Bereichs“. In der Webschnittstelle ist der freie Bewegungsbereich auf dem Gelenkbegrenzungsring grün dargestellt, der Interferenzbereich gelb. Der Bereich, in dem sich der weiße Zeiger befindet, wird hervorgehoben, wie in der folgenden Abbildung gezeigt.
Abbildung 7.6‑10 Anzeige des Gelenkbegrenzungsrings bei „Interferenz außerhalb des Bereichs“
7.6.1.3. Betreten der Achsinterferenzzone im kraftunterstützten Ziehemodus
Schritt 1: Klicken Sie nacheinander auf „Hilfsanwendungen“ -> „Werkzeuganwendungen“ -> „Ziehen sperren“. Schalten Sie den „Zustandsschalter“ der kraftunterstützten Sperrfunktion auf „Aktivieren“. Wählen Sie die Interferenzzonen-Option „Aktivieren“. Stellen Sie die entsprechenden Koeffizienten ein und wenden Sie sie an, wie in der folgenden Abbildung gezeigt.
Abbildung 7.6‑11 Konfigurationsoberfläche für kraftunterstütztes Ziehen
Schritt 2: Ziehen Sie den Roboter im kraftunterstützten Ziehemodus. Wenn der Gelenkwinkel des Roboters den Interferenzbereich erreicht, wechselt der Robotermodus in den Stromregelungs-Ziehemodus (mit Impedanzrückwirkung), sodass er sich von der Achsinterferenzzone entfernen kann. Nach dem Verlassen des Achsinterferenzbereichs wechselt der Robotermodus zurück in den kraftunterstützten Ziehemodus.
7.6.1.4. Quaderinterferenz-Konfiguration
Schritt 1: Richten Sie eine Quaderinterferenzzone ein. Klicken Sie nacheinander auf „Initiale Einstellungen“ -> „Sicherheit“ -> „Interferenzzone“ -> „Einzeln“, um zur Interferenzzonen-Konfigurationsseite zu gelangen. Klicken Sie auf die Karte „Quaderinterferenz“, um zur Oberfläche zu gelangen, und aktivieren Sie den Schieberegler „Funktion aktivieren“.
Schritt 2: Sie können die „Bewegungsstrategie“ auf „Bewegung fortsetzen“ setzen. Wählen Sie die „Ziehstrategie“ als „Ziehen uneingeschränkt“, wie in der folgenden Abbildung gezeigt.
Abbildung 7.6‑12 Quaderinterferenz-Konfiguration
Schritt 3: Konfigurieren Sie die Parameter der Quaderinterferenzzone. Sie können den „Erkennungsmodus“ auf „Rückmeldeposition“ setzen. Der „Interferenzzonenmodus“ kann entweder „Interferenz innerhalb des Bereichs“ oder „Interferenz außerhalb des Bereichs“ sein. Stellen Sie die „Referenzkoordinate“ auf „Basiskoordinate“.
Schritt 4: Wählen Sie die Teach-Methode für den Quaderinterferenzbereich als „Zwei-Punkt-Methode“. Teachen Sie zwei Roboterpunkte, den minimalen und maximalen Punkt im kartesischen Raum. Nach dem Klicken auf „Anwenden“ erscheint ein virtueller Quader in der Webschnittstelle, wie in der folgenden Abbildung gezeigt.
Abbildung 7.6‑13 Einrichten einer Quaderinterferenzzone mit der „Zwei-Punkt-Methode“
Abbildung 7.6‑14 Anzeige des virtuellen Quaders in der Webschnittstelle
Schritt 5: Wählen Sie die Teach-Methode für den Quaderinterferenzbereich als „Mittelpunkt + Seitenlänge“. Teachen Sie einen Roboterpunkt. Stellen Sie die Seitenlängen für X, Y, Z um diesen Punkt herum ein, wie in der folgenden Abbildung gezeigt. Nach dem Klicken auf „Anwenden“ erscheint ein virtueller Quader in der Webschnittstelle.
Abbildung 7.6‑15 Einrichten einer Quaderinterferenzzone mit „Mittelpunkt + Seitenlänge“
Schritt 6: Stellen Sie den „Interferenzzonenmodus“ auf „Interferenz innerhalb des Bereichs“. Wenn sich das Roboterende außerhalb des Quaders befindet, wird der virtuelle Quader in der Webschnittstelle mit 40 % Transparenz gelb angezeigt. Wenn sich das Roboterende innerhalb des Quaders befindet, wird der Quader mit 90 % Transparenz gelb angezeigt und es erscheint die Warnung „Interferenzzone betreten“, wie in der folgenden Abbildung gezeigt.
Abbildung 7.6‑16 Betreten der Quaderinterferenzzone im Modus „Interferenz innerhalb des Bereichs“
Schritt 7: Stellen Sie den „Interferenzzonenmodus“ auf „Interferenz außerhalb des Bereichs“. Wenn sich das Roboterende innerhalb des Quaders befindet, wird der virtuelle Quader in der Webschnittstelle mit 40 % Transparenz grün angezeigt. Wenn sich das Roboterende außerhalb des Quaders befindet, wird der Quader mit 90 % Transparenz grün angezeigt und es erscheint die Warnung „Interferenzzone betreten“, wie in der folgenden Abbildung gezeigt.
Abbildung 7.6‑17 Anzeige des Quaders im Modus „Interferenz außerhalb des Bereichs“
7.6.1.5. Sicherheitswand-Konfiguration
Schritt 1: Richten Sie eine Sicherheitswand ein. Klicken Sie nacheinander auf „Initiale Einstellungen“ -> „Sicherheit“ -> „Sicherheitswand“, um zur Sicherheitswand-Konfigurationsoberfläche zu gelangen. Die Webschnittstelle unterstützt die gleichzeitige Einrichtung von bis zu 8 Sicherheitswänden. Wählen Sie eine Sicherheitswand aus und konfigurieren Sie sie. Nach Abschluss der Konfiguration aktivieren Sie die entsprechende Sicherheitswand. In der Webschnittstelle erscheint eine virtuelle Wand mit 40 % Transparenz in Orange, wie in der folgenden Abbildung gezeigt.
Abbildung 7.6‑18 Sicherheitswand-Konfiguration
Abbildung 7.6‑19 Anzeige der virtuellen Wand in der Webschnittstelle
Schritt 2: Wenn das Roboterende in die Sicherheitswand eintritt, wird die virtuelle Wand mit 90 % Transparenz orange angezeigt und es erscheint die Warnung „Sicherheitswand betreten“, wie in der folgenden Abbildung gezeigt.
Abbildung 7.6‑20 Anzeige der virtuellen Wand beim Betreten durch das Roboterende
7.6.2. Quaderinterferenz-Funktion
7.6.2.1. Überblick
Die Quaderinterferenz-Funktion unterstützt die gleichzeitige Definition und Aktivierung mehrerer unabhängiger Quader-Interferenzzonen. Die Position und Größe jeder Interferenzzone im dreidimensionalen Raum können unabhängig voneinander eingestellt werden. Darüber hinaus ist jede Interferenzzone mit einem separaten CO-Auslösesignalausgang ausgestattet, der basierend auf der Echtzeitposition des Roboters ein entsprechendes Triggersignal ausgeben kann.
7.6.2.2. Vorgehen
Schritt 1: Aktivieren Sie die Quaderinterferenz-Funktion und führen Sie die Basiskonfiguration durch. Klicken Sie nacheinander auf „Initiale Einstellungen“ -> „Sicherheit“ -> „Interferenzzone“ -> „Quaderinterferenz“. Über Schieberegler wird gesteuert, ob jede einzelne Quaderinterferenzzone aktiviert ist, und die Basiskonfiguration durchgeführt.
Die Bewegungsstrategie beim Betreten der Interferenzzone kann als „Bewegung fortsetzen“ oder „Stopp“ gewählt werden. Bei Auswahl von „Bewegung fortsetzen“ wird beim Betreten der Interferenzzone eine Warnung angezeigt, aber die Bewegung wird fortgesetzt. Bei Auswahl von „Stopp“ wird beim Betreten der Interferenzzone eine Warnung angezeigt und die Bewegung gestoppt. Die Ziehstrategie beim Betreten der Interferenzzone kann als „Ziehen uneingeschränkt“, „Impedanzrückführung“ oder „Rückkehr in den Handmodus“ gewählt werden.
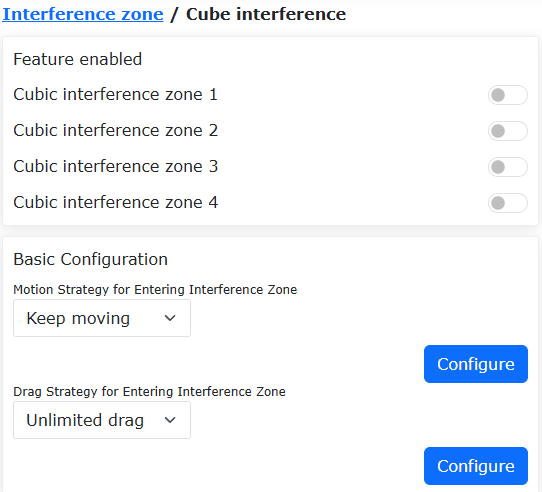
Abbildung 7.6‑21 Quader-Aktivierungssteuerung und Basiskonfiguration
Schritt 2: Führen Sie die Konfiguration der Quaderinterferenzzonen durch. Für jede Interferenzzonen-ID können unterschiedliche Konfigurationsparameter eingestellt werden. Zu beachten ist:
Die Erkennungsmethode muss je nach tatsächlichem Funktionsbedarf als „Befehlsposition“ oder „Rückmeldeposition“ gewählt werden.
Wenn der Interferenzzonenmodus auf „Interferenz außerhalb des Bereichs“ gesetzt ist, gilt dies nur für die einzelne Interferenzzone.
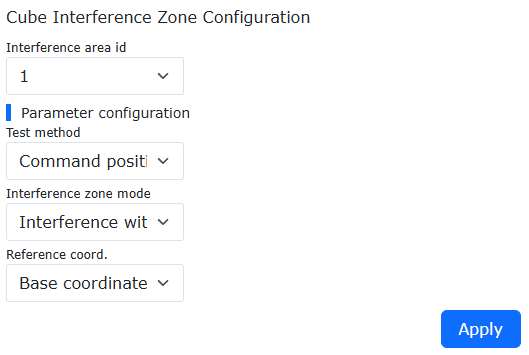
Abbildung 7.6‑22 Konfiguration der Quaderinterferenzzone
Schritt 3: Führen Sie die Bereichseinstellung der Interferenzzone durch. Die Bereichseinstellung kann die Quaderinterferenzzone entweder mit der „Zwei-Punkt-Methode“ oder „Mittelpunkt + Seitenlänge“ erzeugen. Die „Zwei-Punkt-Methode“ erzeugt den Quader durch Angabe zweier diagonal gegenüberliegender Eckpunkte. „Mittelpunkt + Seitenlänge“ erzeugt den Quader durch Angabe des Mittelpunkts und der drei Seitenlängen.
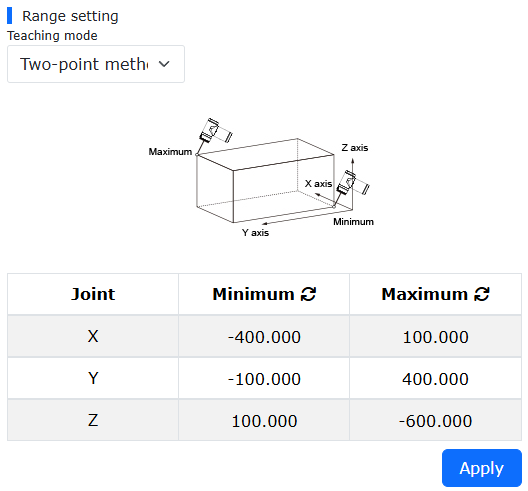
Abbildung 7.6‑23 Erzeugung einer Interferenzzone mit der „Zwei-Punkt-Methode“
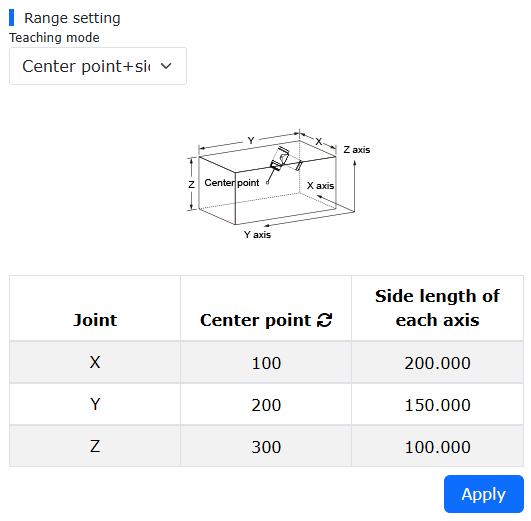
Abbildung 7.6‑24 Erzeugung einer Interferenzzone mit „Mittelpunkt + Seitenlänge“
Schritt 4: Führen Sie die CO-Signal-Einstellung durch. Klicken Sie nacheinander auf „Initiale Einstellungen“ -> „Basis“ -> „I/O-Einstellungen“ -> „DO“. Konfigurieren Sie für jeden Quader den entsprechenden CO-Ausgang.
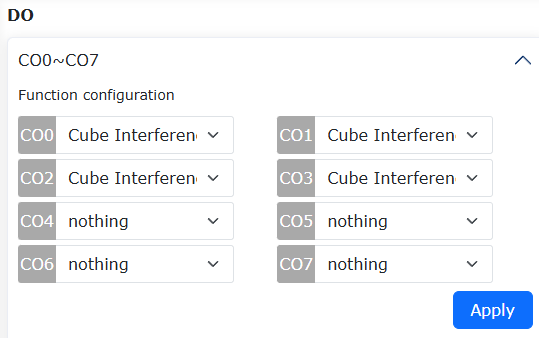
Abbildung 7.6‑25 CO-Ausgangskonfiguration
Schritt 5: Jede Quaderinterferenzzone wird entsprechend der eingestellten ID-Nummer auf der Roboteroberfläche angezeigt. Wenn der Mittelpunkt des Roboterendes in die Interferenzzone eintritt, zeigt die Oberfläche die Warnung „Interferenzzone betreten“ an und der entsprechende CO-Ausgang gibt ein Signal aus.
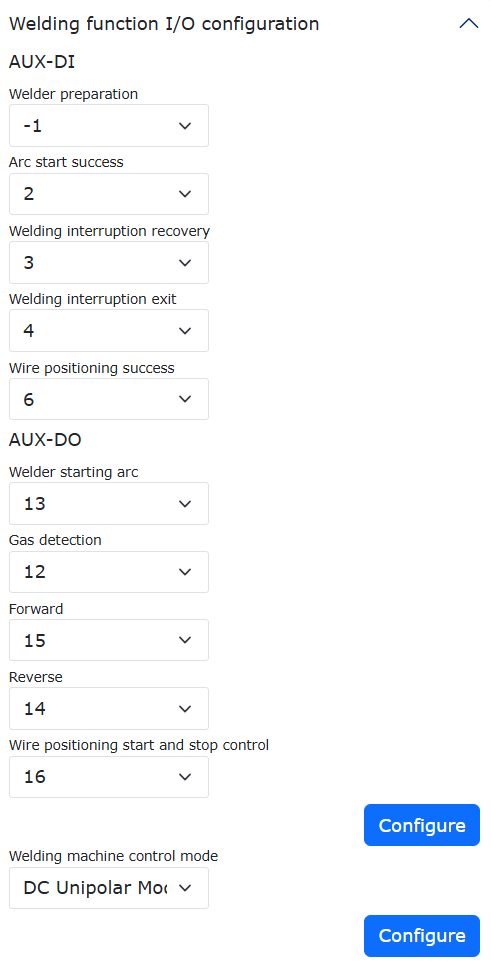
Abbildung 7.6‑26 Anzeige mehrerer Quaderinterferenzzonen auf der Oberfläche
7.7. Reduzierter Modus
Klicken Sie in der Menüleiste auf „Initiale Einstellungen“ -> „Sicherheit“. Klicken Sie auf das Untermenü „Reduzierter Modus“, um zur Konfigurationsoberfläche zu gelangen. Wählen Sie „Erste/Zweite Stufe“, um die Gelenkgeschwindigkeiten und die TCP-Endgeschwindigkeit zu konfigurieren.
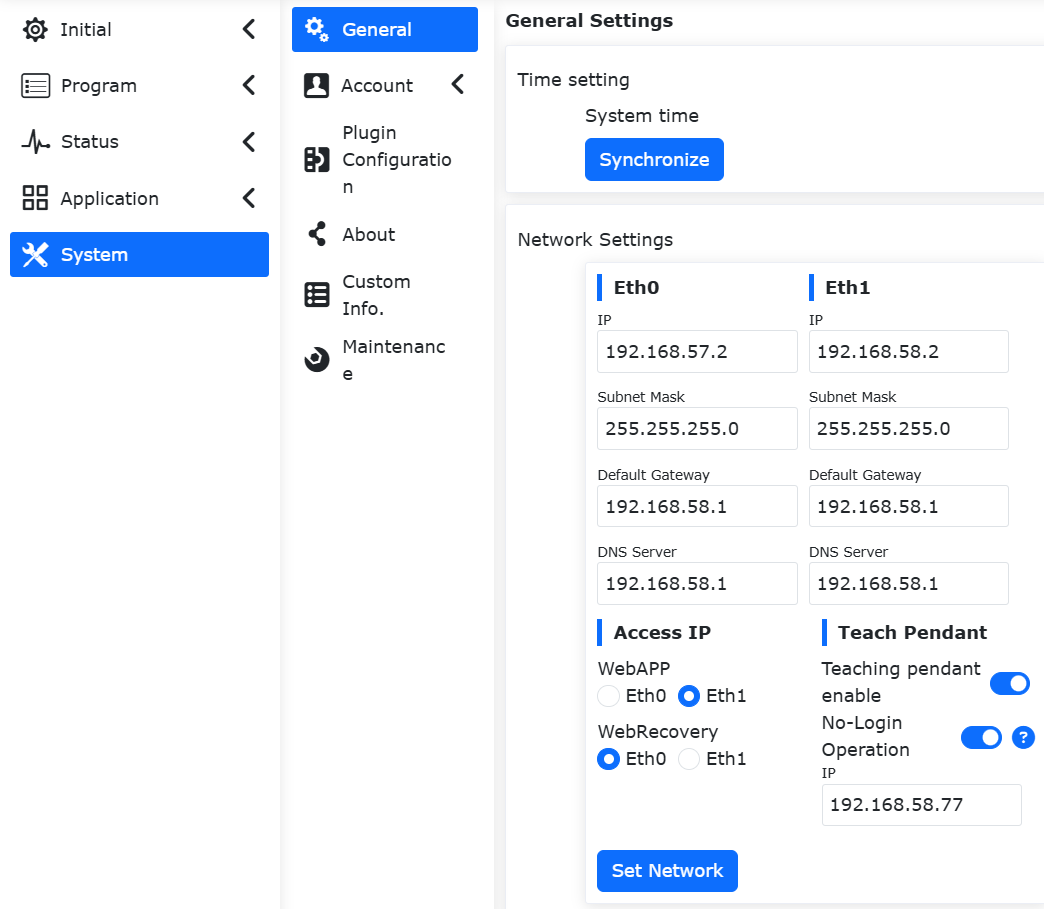
Abbildung 7.7-1 Reduzierter Modus
7.8. Sicherheitswand
Klicken Sie in der Menüleiste auf „Initiale Einstellungen“ -> „Sicherheit“. Klicken Sie auf das Untermenü „Sicherheitswand-Konfiguration“, um zur Konfigurationsoberfläche zu gelangen.
Sicherheitswand-Konfiguration: Klicken Sie auf die Aktivierungsschaltfläche, um die entsprechende Sicherheitswand zu aktivieren. Wenn für die Sicherheitswand kein Sicherheitsbereich konfiguriert ist, wird ein Fehler angezeigt. Klicken Sie auf das Dropdown-Menü, wählen Sie die gewünschte Sicherheitswand aus. Der Sicherheitsabstand wird automatisch übernommen (kann nicht eingestellt werden, Standard ist 0). Klicken Sie dann auf die Schaltfläche „Einstellen“. Die Einstellung war erfolgreich.

Abbildung 7.8-1 Sicherheitswand-Konfiguration
Sicherheitswand-Referenzpunktkonfiguration: Nach Auswahl einer Sicherheitswand können vier Referenzpunkte eingestellt werden. Die ersten drei Punkte sind Ebenen-Referenzpunkte. Sie dienen zur Bestimmung der Ebene der eingestellten Sicherheitswand. Der vierte Punkt ist der Sicherheitsbereichs-Referenzpunkt. Er dient zur Bestimmung des Sicherheitsbereichs der eingestellten Sicherheitswand.
Wichtig
Wenn die Referenzpunkte erfolgreich eingestellt wurden, leuchtet die Lampe grün. Andernfalls leuchtet sie gelb. Sobald die Referenzpunkte erfolgreich eingestellt wurden, wechselt die Lampe auf grün. Wenn alle vier Referenzpunkte erfolgreich eingestellt wurden, kann der Sicherheitsbereich berechnet werden. Nach erfolgreicher Berechnung kehrt der Status der Sicherheitsbereichsparameterpunkte auf den Standard zurück.
Abbildung 7.8-2 Einstellung der Sicherheitsbereichs-Referenzpunkte
Anwendungseffekt: Aktivieren Sie die erfolgreich konfigurierte Sicherheitswand. Ziehen Sie den Roboter. Wenn sich das TCP des Roboterendes innerhalb des eingestellten Sicherheitsbereichs befindet, arbeitet das System normal. Befindet es sich außerhalb des eingestellten Sicherheitsbereichs, wird ein Fehler angezeigt.
Abbildung 7.8-3 Effekt nach erfolgreicher Sicherheitsbereichseinstellung
7.9. Sicherheits-Hintergrundprogramm
Klicken Sie in der Menüleiste auf „Initiale Einstellungen“ -> „Sicherheit“. Klicken Sie auf das Untermenü „Sicherheits-Hintergrundprogramm“, um zur Konfigurationsoberfläche zu gelangen.
Der Benutzer kann die Einstellungen des Sicherheits-Hintergrundprogramms über die Schaltfläche „Funktion aktivieren“ ein- oder ausschalten. Wählen Sie eine „Unerwartete Situation“ und ein „Hintergrundprogramm“ aus. Klicken Sie auf die Schaltfläche „Einstellen“, um die Parameter für die Behandlung unerwarteter Situationen zu konfigurieren.
Wenn das Sicherheits-Hintergrundprogramm aktiviert ist und Szenarien für unerwartete Situationen sowie Hintergrundprogramme festgelegt wurden, führt der Roboter das entsprechende Hintergrundprogramm aus, wenn während der Programmausführung eine unerwartete Situation eintritt, die mit den eingestellten übereinstimmt. Dies dient dem Sicherheitsschutz.
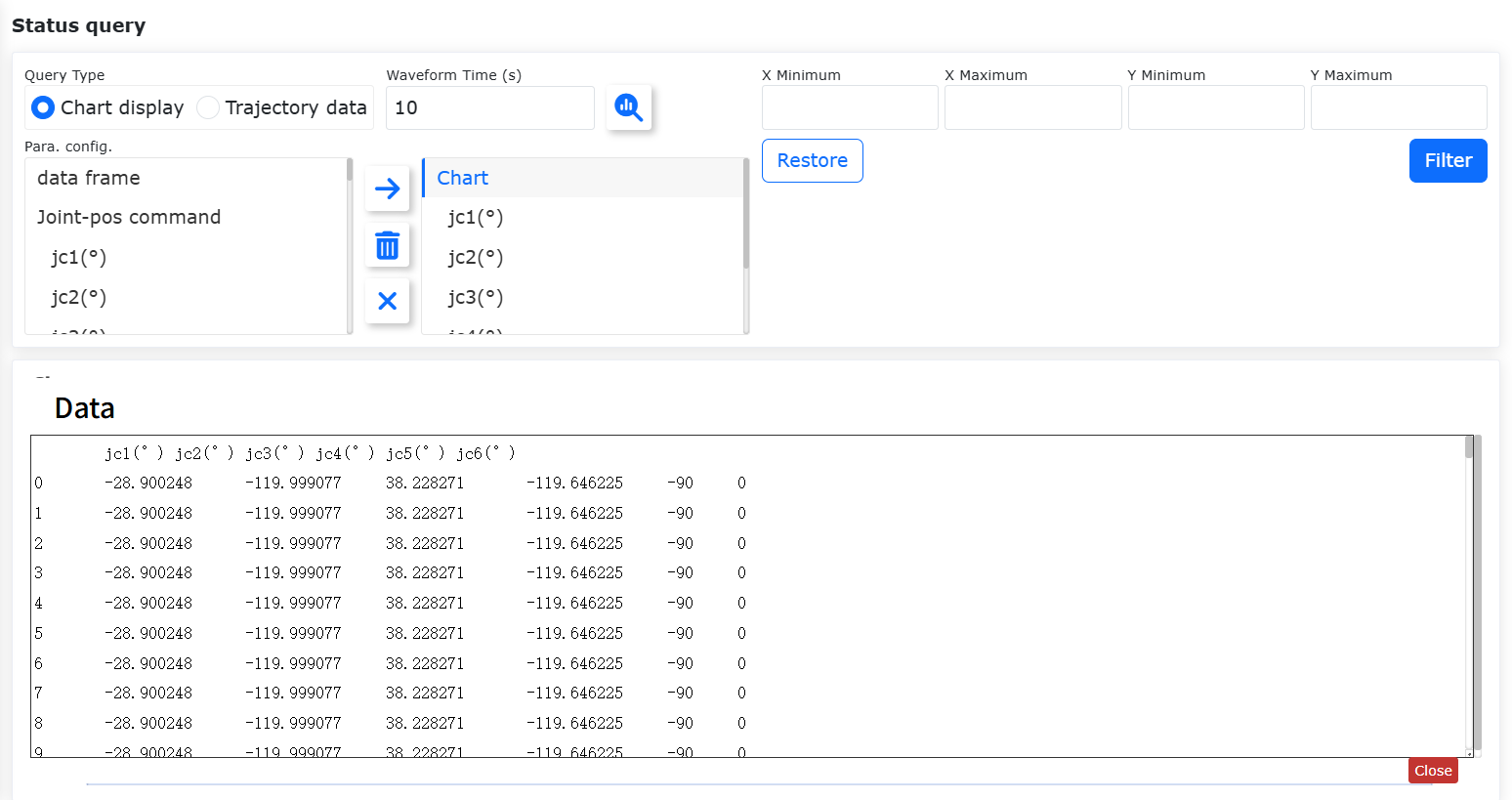
Abbildung 7.9-1 Sicherheits-Hintergrundprogramm
7.10. Werkzeugrichtungsbegrenzung (nur unter LA-System)
Klicken Sie in der Menüleiste auf „Initiale Einstellungen“ -> „Sicherheit“. Klicken Sie auf das Untermenü „Werkzeugrichtungsbegrenzung“, um zur Konfigurationsoberfläche zu gelangen.
Die Werkzeugrichtungsbegrenzung ist eine Schutzfunktion, die im kartesischen Raum des Roboter-Werkzeugendes wirkt und den Bewegungsbereich der Werkzeugausrichtung einschränkt. Sie umfasst die Aktivierung der Funktion, die Einstellung der Referenzwerkzeugrichtung und die Einstellung des maximalen Abweichungswinkels. Der maximale Abweichungswinkel definiert den maximal zulässigen Winkel zwischen der Z-Achse des Werkzeug-Koordinatensystems und der Referenzwerkzeugrichtung. Dies kann man sich als kegelförmigen Raum vorstellen.
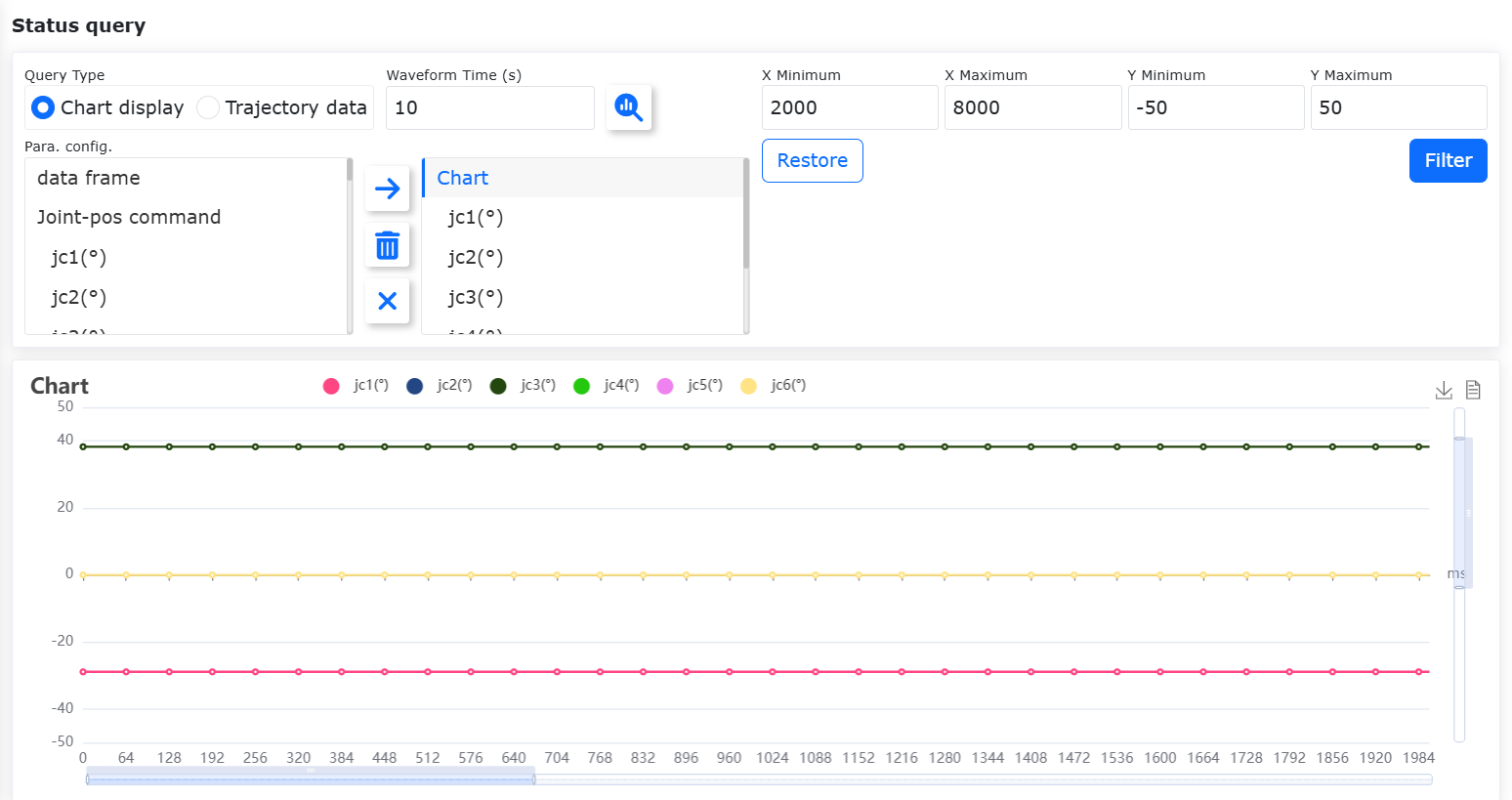
Abbildung 7.10-1 Werkzeugrichtungsbegrenzung
7.11. Robotergrenzwerte (nur unter LA-System)
Klicken Sie in der Menüleiste auf „Initiale Einstellungen“ -> „Sicherheit“. Klicken Sie auf das Untermenü „Robotergrenzwerte“, um zur Konfigurationsoberfläche zu gelangen.
Die Robotergrenzwerte umfassen Impuls und Leistung. Der Impulsgrenzwert dient zur Begrenzung des maximalen Impulses des Roboters. Der Leistungsgrenzwert dient zur Begrenzung der vom Roboter verrichteten mechanischen Arbeit.
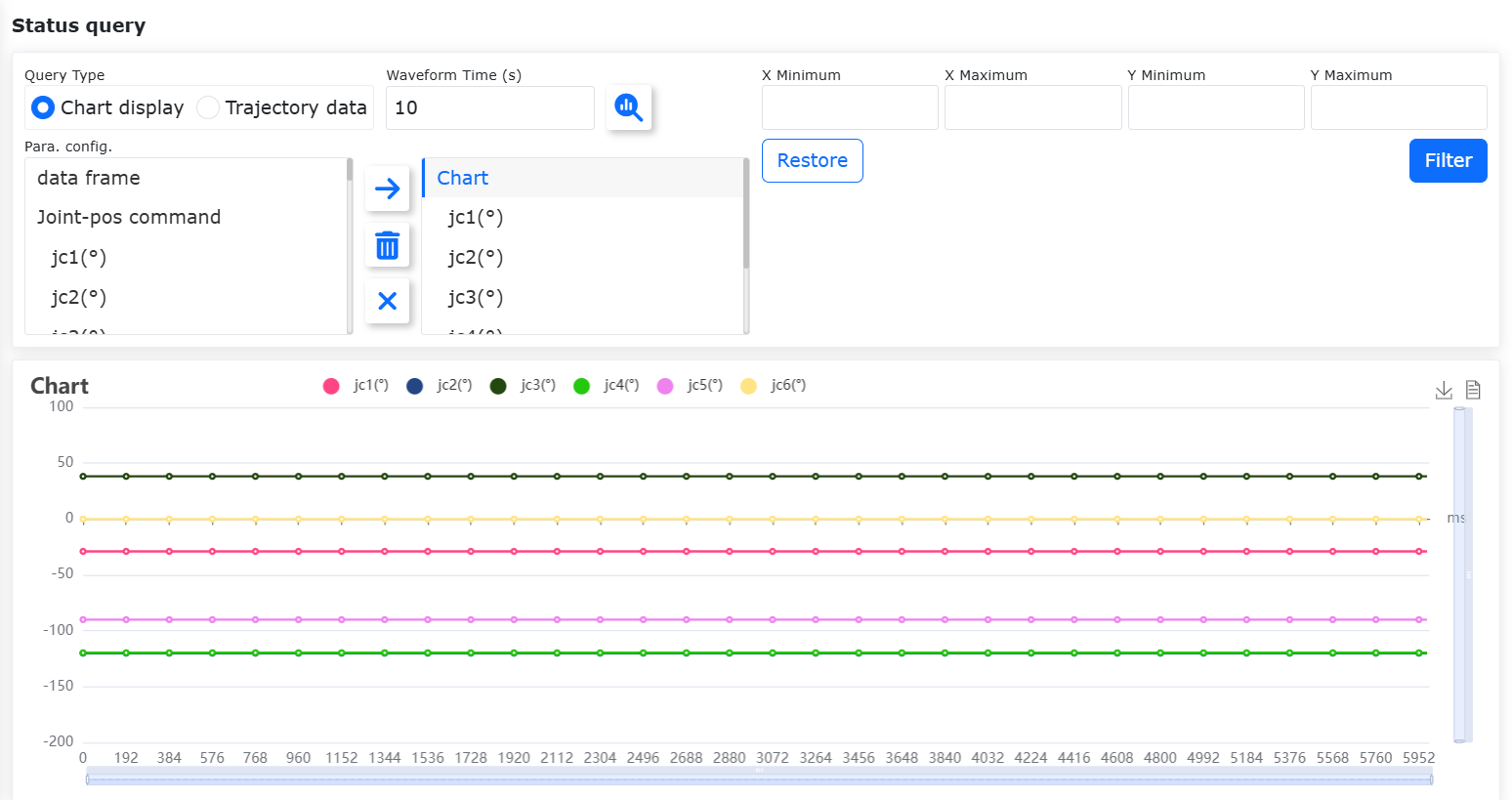
Abbildung 7.11-1 Robotergrenzwerte
7.12. Leistungserkennung (nur unter QX-System)
Klicken Sie in der Menüleiste auf „Initiale Einstellungen“ -> „Sicherheit“. Klicken Sie auf das Untermenü „Leistungserkennung“, um zur Konfigurationsoberfläche zu gelangen.
Diese Funktion wirkt auf den Stromregelkreis, der direkt auf den Roboter einwirkt (nur Befehl servoJT). Sie dient zur Begrenzung der vom Roboter verrichteten Arbeit. Wenn die Erkennung feststellt, dass das Integral aus Robotergeschwindigkeit und -drehmoment den Grenzwert überschreitet, wird ein Leistungsschutz ausgelöst.
Abbildung 7.12-1 Leistungserkennung
7.13. Bewegungskonfiguration
7.13.1. Optimierte T-förmige Geschwindigkeitscharakteristik + Blending-Funktion
7.13.1.1. Überblick
Blending zwischen zwei Bewegungssegmenten vermeidet häufige Start-Stopp-Vorgänge, die durch vollständiges Anhalten entstehen würden, und verbessert so die Bewegungseffizienz des Roboters.
Diese Funktion wirkt hauptsächlich auf Blending zwischen den Befehlen PTP-PTP, LIN-LIN, ARC-ARC, LIN-ARC und ARC-LIN. Blending zwischen anderen Befehlskombinationen ist nicht wirksam.
7.13.1.2. Vorgehen
Da die Vorgehen für die verschiedenen Befehle ähnlich ist, wird in diesem Handbuch das Blending zwischen PTP-PTP als Beispiel zur Erläuterung der Funktionsweise verwendet. Diese Funktion kann auf zwei Arten realisiert werden: Verwendung von Lua-Befehlen oder Verwendung des Bewegungskonfigurationsschalters.
7.13.1.2.1. Verwendung von Lua-Befehlen
Schritt 1: Wählen Sie die Teach-Punkte aus, für die die PTP-Funktion ausgeführt werden soll. In diesem Handbuch werden „A0“ bis „A5“ als Namen für die Teach-Punkte verwendet.
Schritt 2: Klicken Sie auf „Teach-Programm“ -> „Programmierung“. Wählen Sie den Befehl „Punkt-zu-Punkt“ unter „Bewegungsbefehle“. Wählen Sie im „Befehlseditor“ den Teach-Punkt aus und stellen Sie die Testgeschwindigkeit ein. Wählen Sie als Bewegungsprofil „Beschleunigungs-Glättungsmodus“. Stellen Sie den Parameter „Glättungsübergang“ für die Punkte ein, an denen eine Glättung erfolgen soll.
Abbildung 7.13-1 Einstellung des PTP-Blending-Befehls mit Beschleunigungsglättung
Schritt 3: Generieren Sie das Lua-Programm und führen Sie es aus. Die Blending-Funktion zwischen PTP-PTP wird realisiert. Bei dieser Methode werden nur die Befehle zwischen AccSmoothStart() und AccSmoothEnd() mit der optimierten T-förmigen Geschwindigkeit ausgeführt. Alle anderen Befehle verwenden die ursprüngliche T-förmige Geschwindigkeit.
Abbildung 7.13-2 Typisches Programm für PTP-PTP-Blending mittels Lua-Befehl
7.13.1.2.2. Verwendung des Bewegungskonfigurationsschalters
Schritt 1: Klicken Sie auf „Initiale Einstellungen“ -> „Sicherheit“ -> „Bewegungskonfiguration“. Schalten Sie den Schalter „Beschleunigungs-Glättungsmodus“ ein.
Abbildung 7.13-3 Konfigurationsschalter für den Beschleunigungs-Glättungsmodus
Schritt 2: Wählen Sie die Teach-Punkte aus, für die die PTP-PTP-Funktion ausgeführt werden soll. In diesem Handbuch werden „A0“ bis „A5“ als Namen für die Teach-Punkte verwendet.
Schritt 3: Klicken Sie auf „Teach-Programm“ -> „Programmierung“. Wählen Sie den Befehl „Punkt-zu-Punkt“ unter „Bewegungsbefehle“. Wählen Sie im „Befehlseditor“ den Teach-Punkt aus und stellen Sie die Testgeschwindigkeit ein. Wählen Sie als Bewegungsprofil „Kein“. Stellen Sie den Parameter „Glättungsübergang“ für die Punkte ein, an denen eine Glättung erfolgen soll.

Abbildung 7.13-4 Einstellung des PTP-Blending-Befehls (Standard)
Schritt 4: Generieren Sie das Lua-Programm und führen Sie es aus. Die Blending-Funktion zwischen PTP-PTP wird realisiert. Das typische Programm ist identisch mit einem Standard-PTP-Programm. Bei dieser Methode werden alle Befehle mit der optimierten T-förmigen Geschwindigkeit ausgeführt.
Abbildung 7.13-5 Typisches Programm für PTP-PTP-Blending mittels Konfigurationsschalter
7.13.2. FIR-adaptive Parameterfunktion + FIR-Pause-Fortsetzen-Funktion
7.13.2.1. Überblick
Die Funktion zur adaptiven Parametereinstellung des zeitoptimalen Roboter-Modus ermöglicht es, auf die manuelle Konfiguration seiner Parameter zu verzichten. Die Funktion passt die Parameter des zeitoptimalen Modus basierend auf dem aktuellen Betriebszustand des Roboters automatisch an, was die Inbetriebnahme-Effizienz verbessert.
7.13.2.2. Vorgehen
Die grundlegenden Bewegungsbefehle PTP, LIN und ARC des Roboters werden auf ähnliche Weise verwendet. In diesem Beispiel dient der PTP-Bewegungsbefehl im zeitoptimalen Modus als Hauptbeispiel.
Schritt 1: Klicken Sie in der Roboter-Websteuerung nacheinander auf „Initiale Einstellungen“ -> „Sicherheit“ -> „Bewegungskonfiguration“, um zur „Bewegungskonfigurations“-Oberfläche zu gelangen.
Abbildung 7.13-6 Bewegungskonfigurations-Oberfläche
Schritt 2: Klicken Sie in der „Bewegungskonfigurations“-Oberfläche auf den Schalter „Zeitoptimaler Modus“, um zur Oberfläche des „Zeitoptimalen Modus“ zu gelangen.
Abbildung 7.13-7 Oberfläche des Zeitoptimalen Modus
Bemerkung
Im Bereich „Parametereinstellung“ der Oberfläche „Zeitoptimaler Modus“ kann im Feld „Einstellkoeffizient“ ein Wert von -100 bis 100 eingestellt werden. Dies stellt einen Skalierungsfaktor dar, der den Grad der Zeitoptimalität des Bewegungsbefehls steuert. Der Standardwert ist 1.
Schritt 3: Bestimmen Sie die Teach-Punkte, für die die PTP-Bewegung ausgeführt werden soll. In diesem Beispiel werden „A0“ bis „A5“ als Namen für die Teach-Punkte verwendet.
Schritt 4: Klicken Sie in der Roboter-Websteuerung nacheinander auf „Teach-Programm“ -> „Programmierung“, um zur „Bewegungsbefehle“-Oberfläche zu gelangen.
Abbildung 7.13-8 Bewegungsbefehle-Oberfläche
Schritt 5: Klicken Sie in der „Bewegungsbefehle“-Oberfläche auf „Punkt-zu-Punkt“, um zur Bearbeitungsoberfläche des „PTP“-Befehls zu gelangen. Wählen Sie im Dropdown-Feld „Punktname“ den Teach-Punkt aus, stellen Sie im Feld „Testgeschwindigkeit“ den gewünschten Geschwindigkeitsprozentsatz ein, wählen Sie im Feld „An diesem Punkt“ „Stopp“, wählen Sie im Dropdown-Feld „Versatz“ „Nein“ und im Feld „Bewegungsprofil“ „Kein“. Klicken Sie dann auf „Hinzufügen“.
Abbildung 7.13-9 Bearbeitungsoberfläche des PTP-Bewegungsbefehls
Schritt 6: Klicken Sie in der Bearbeitungsoberfläche des „PTP“-Bewegungsbefehls auf „Anwenden“. Das entsprechende LUA-Programm wird automatisch generiert.
Abbildung 7.13-10 Typisches PTP-Bewegungs-LUA-Programm im zeitoptimalen Modus
Bemerkung
Das typische PTP-Bewegungs-LUA-Programm im zeitoptimalen Modus unterscheidet sich nicht von einem normalen PTP-Bewegungs-LUA-Programm. Der Unterschied liegt darin, dass im Schritt 2 die Funktion „Zeitoptimaler Modus“ bereits aktiviert wurde.
Wenn der Schalter „Zeitoptimaler Modus“ aktiviert ist, befinden sich die grundlegenden Bewegungsbefehle PTP, LIN und ARC im zeitoptimalen Modus. Durch Deaktivieren des Schalters „Zeitoptimaler Modus“ in dieser Oberfläche kann der Zustand der grundlegenden Bewegungsbefehle PTP, LIN und ARC wiederhergestellt werden. In dieser Oberfläche kann der Schalter „Beschleunigungs-Glättungsmodus“ nicht gleichzeitig aktiviert werden.