2. Einführung in den Roboter
2.1. Grundlegende Parameter
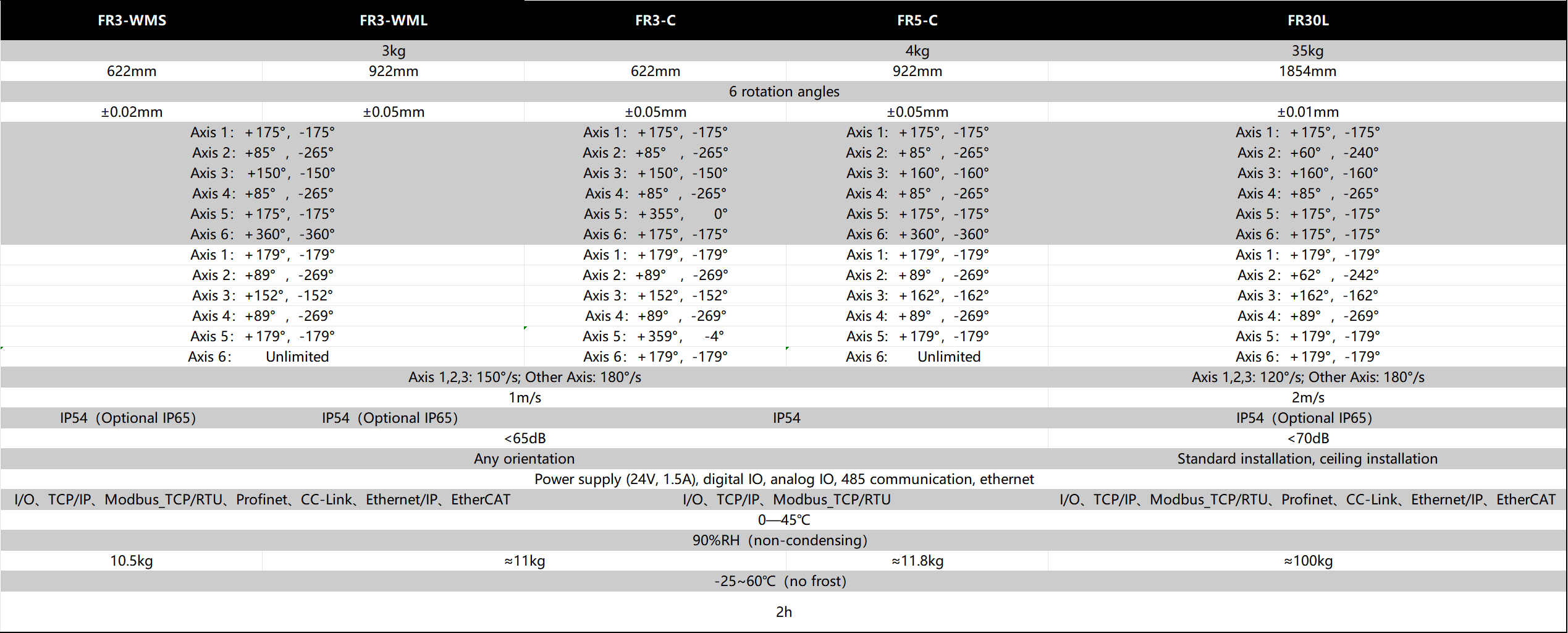
Tabelle 2.1-1 Grundlegende Roboterparameter
Wichtig
Bei der Berechnung homogener Transformationsmatrizen für Pose- oder Koordinatensystemtransformationen der FR-Roboterserie ist die Drehreihenfolge der Winkel die des beweglichen Koordinatensystems „ZYX“.
2.2. Bewegungsbereich
Installationsraum des Roboterarms:
Für die Montage des Roboterkörpers wird ein Raum von 3 m × 3 m × 2 m (Länge × Breite × Höhe) benötigt, um die Bewegung bei maximaler Reichweite des Roboters zu gewährleisten. Wenn der Benutzer selbst eine Endeffektorlast hinzufügt, stellen Sie bitte sicher, dass im Installationsraum ein Abstand von mindestens 500 mm verbleibt.
Bemerkung
Der Höhenraum wird durch die Höhe des Montagesockels beeinflusst. Hier bezieht sich 2 m auf den Abstand über der Montagebezugsebene.
Installationsraum des Steuerpults:
Das Steuerpult sollte leicht zugänglich und vor Überschwemmungen und Stromschlägen geschützt in einer Höhe von 0,6 m bis 1,5 m über dem Boden platziert werden.
Das Gehäuse muss von Wärmequellen ferngehalten werden.
Auf der Seite des Schwerlastkabels des Steuerpults sollte ein Abstand von mindestens 150 mm zu Hindernissen eingehalten werden, auf den anderen Seiten mindestens 100 mm, um die Wärmeableitung und das Ein- und Ausstecken zu erleichtern.
Abbildung 2.2-1 Bewegungsbereich des kollaborativen Roboters FR3
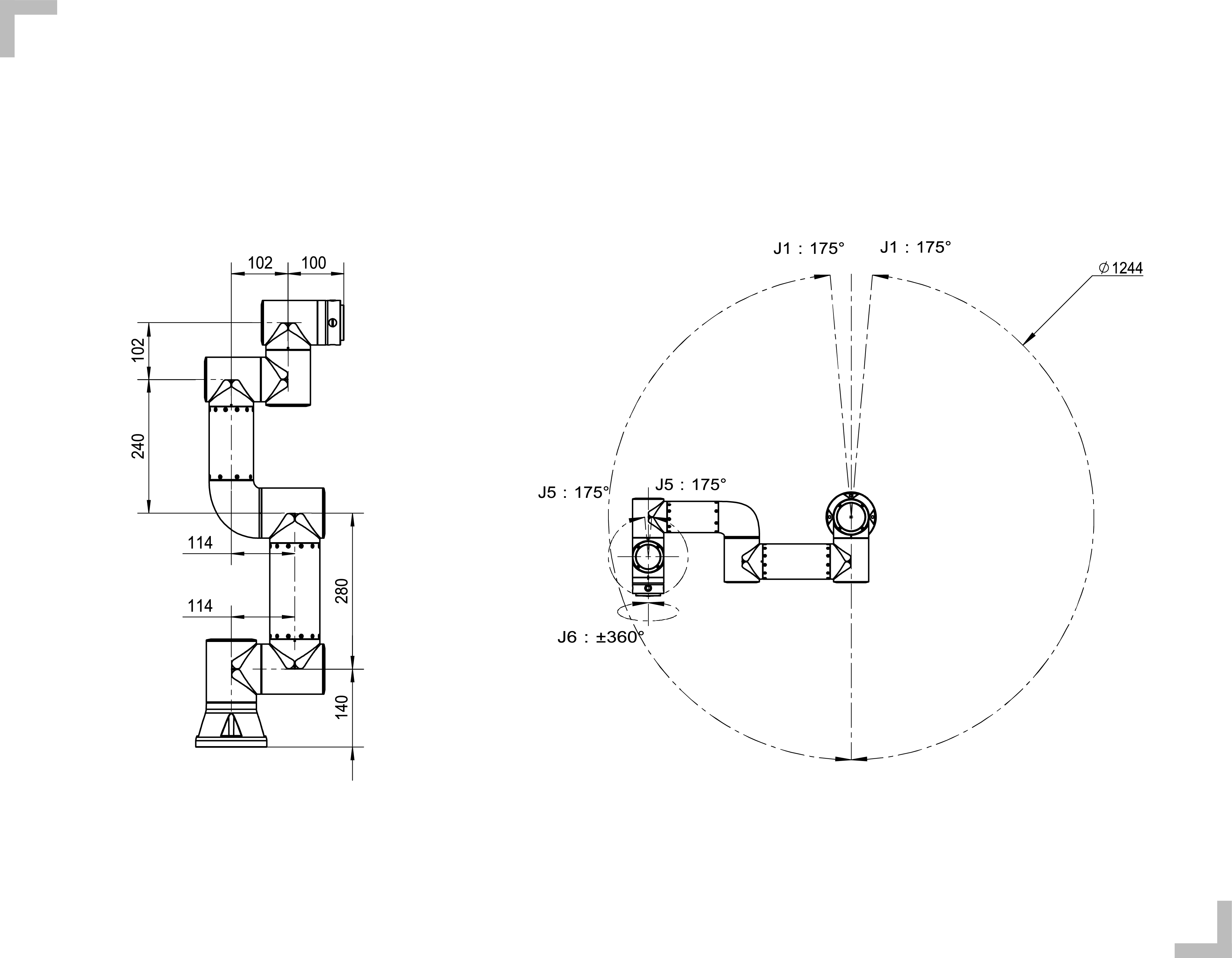
Abbildung 2.2-2 Bewegungsbereich des kollaborativen Roboters FR3-WML
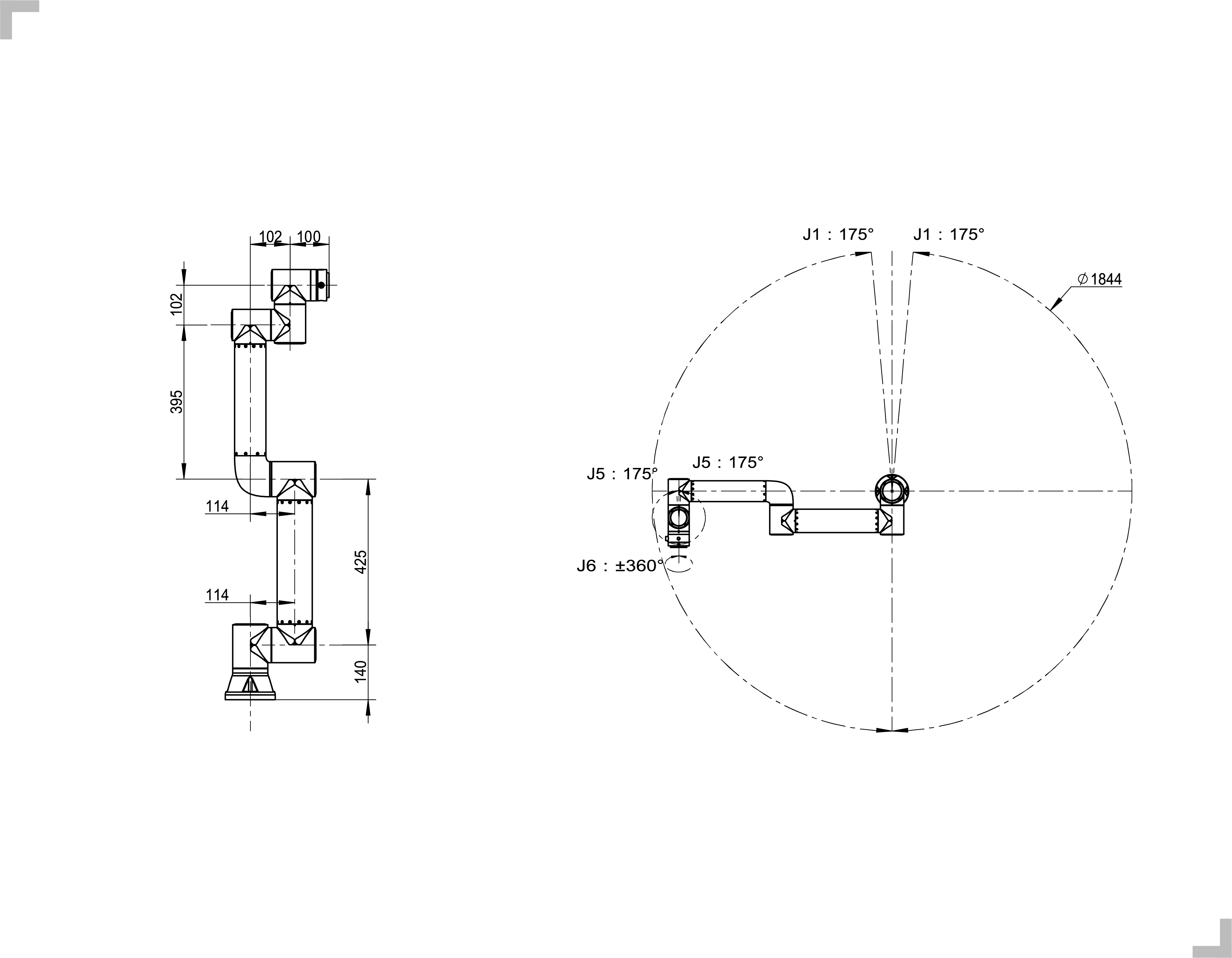
Abbildung 2.2-3 Bewegungsbereich des kollaborativen Roboters FR3-WMS
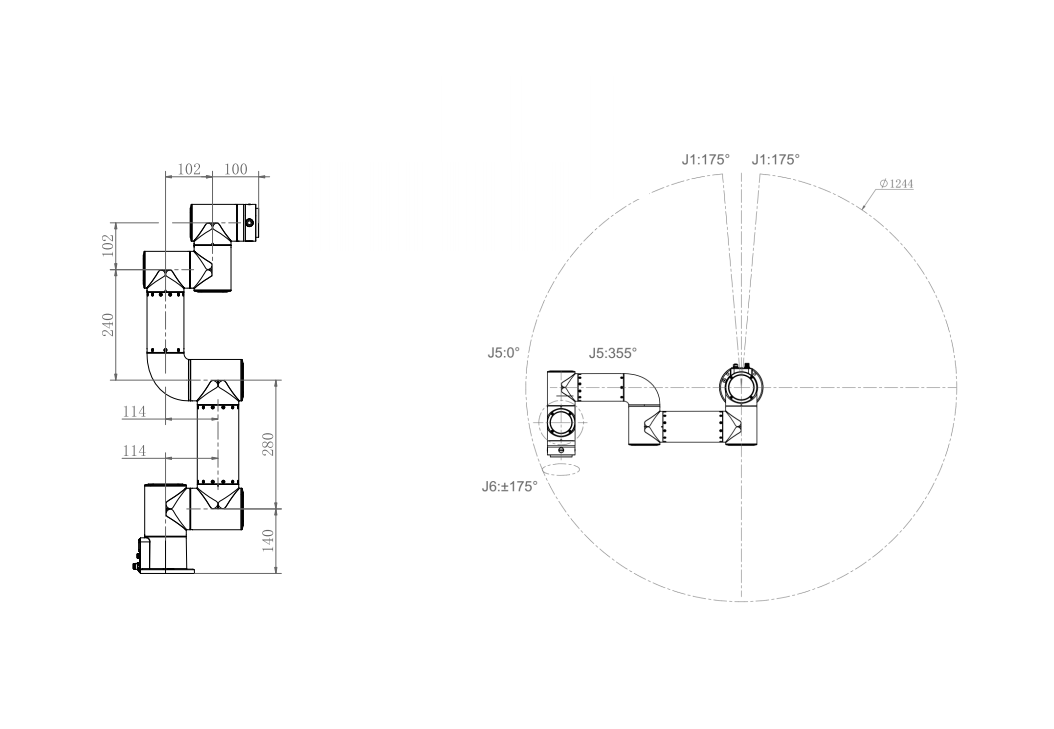
Abbildung 2.2-4 Bewegungsbereich des kollaborativen Roboters FR3-C
Abbildung 2.2-5 Bewegungsbereich des kollaborativen Roboters FR5
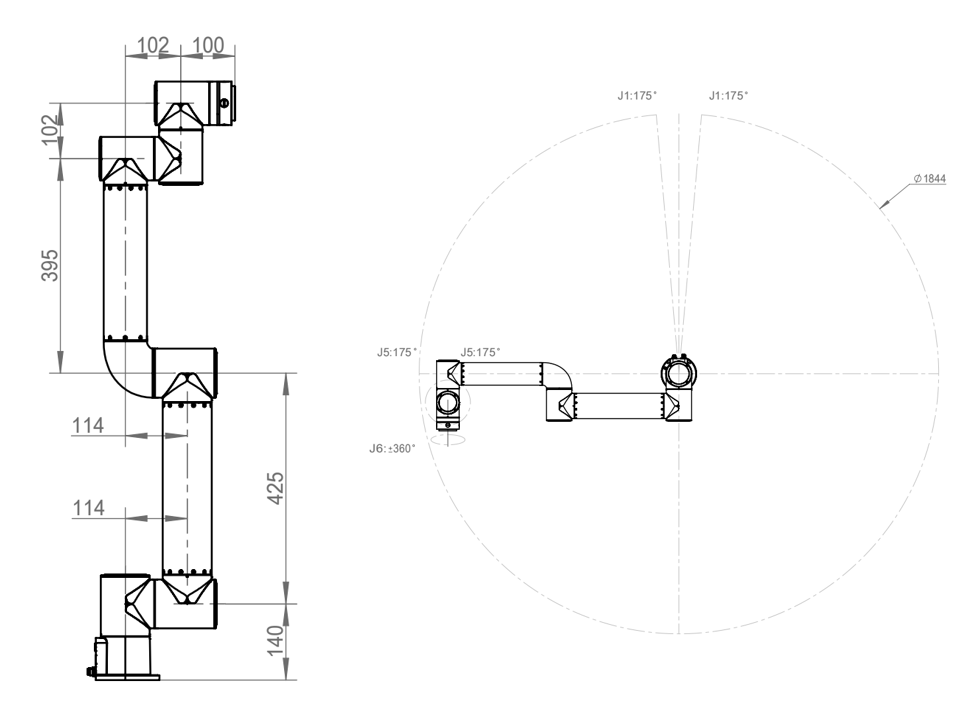
Abbildung 2.2-6 FR5-C Modell Kollaborativer Roboter Bewegungsbereich
Abbildung 2.2-7 Bewegungsbereich des kollaborativen Roboters FR10
Abbildung 2.2-8 Bewegungsbereich des kollaborativen Roboters FR16
Abbildung 2.2-9 Bewegungsbereich des kollaborativen Roboters FR20
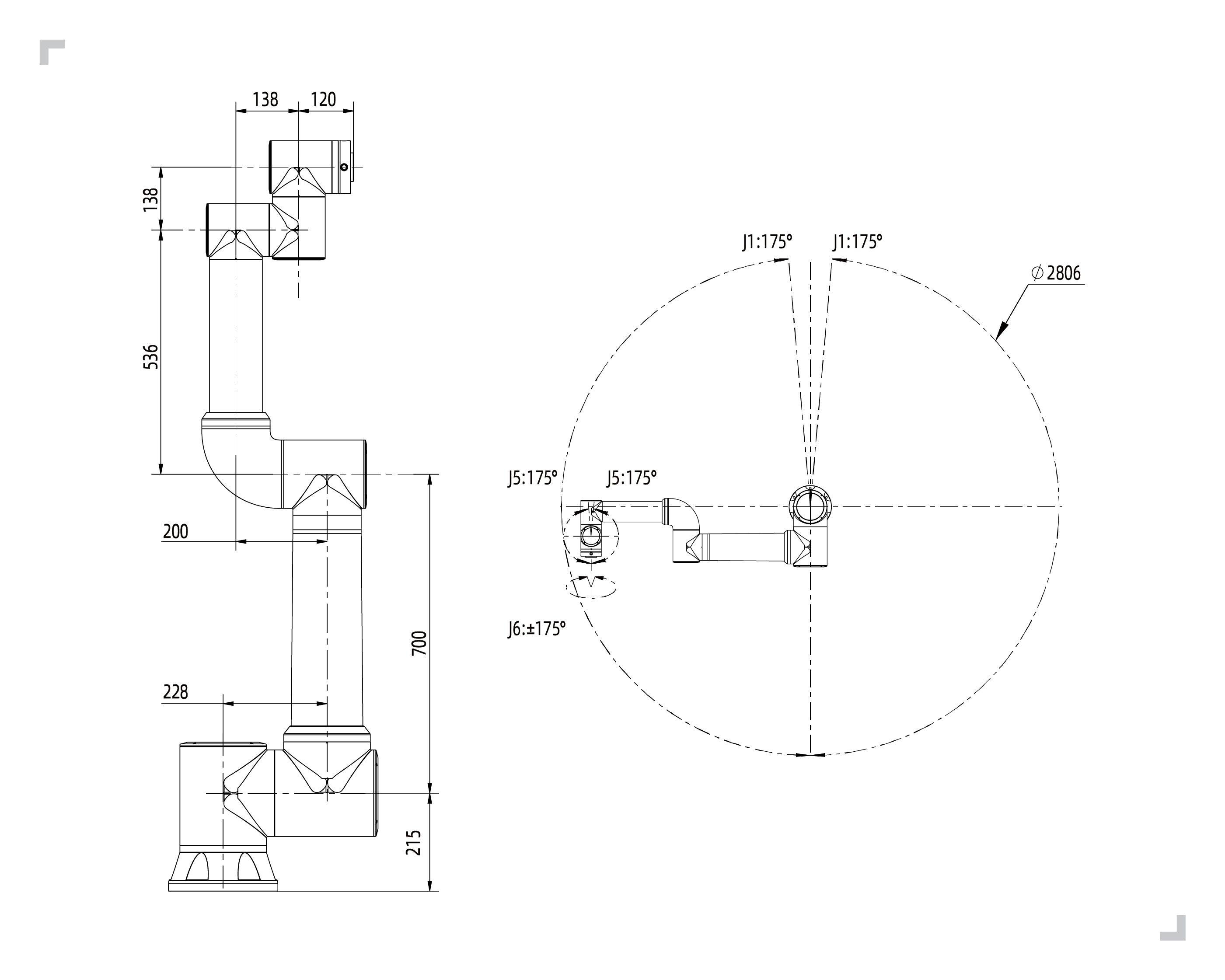
Abbildung 2.2-10 Bewegungsbereich des kollaborativen Roboters FR30
2.3. Roboter-Koordinatensysteme
Abbildung 2.3-1 DH-Parameter-Koordinatensystem des Roboters
Abbildung 2.3-2 Koordinatensystem des Roboter-Endflansches
2.4. DH-Parameter des Roboters
Die DH-Parameter werden zur Berechnung der Kinematik und Dynamik der kollaborativen Roboter der FR-Serie verwendet.
Abbildung 2.4-1 DH-Parameter der kollaborativen Roboter der FR-Serie
Die DH-Parameter der kollaborativen Roboter der FR-Serie sind wie folgt dargestellt:
Tabelle 2.4-1 DH-Parameter des kollaborativen Roboters FR3
Kinematik |
theta[rad] |
a[mm] |
d[mm] |
alpha[rad] |
Dynamik |
Masse[kg] |
Massenschwerpunkt[mm] |
Joint1 |
0 |
0 |
140 |
π/2 |
Link1 |
1.98 |
[-0.05, -15.92, 2.26] |
Joint2 |
0 |
-280 |
0 |
0 |
Link2 |
3.4445 |
[139.49, 0, 99.54] |
Joint3 |
0 |
-240 |
0 |
0 |
Link3 |
1.437 |
[58.99, 0.08, 12.99] |
Joint4 |
0 |
0 |
102 |
π/2 |
Link4 |
0.871 |
[0.05, -2.33, 14.67] |
Joint5 |
0 |
0 |
102 |
-π/2 |
Link5 |
0.805 |
[-0.05, 2.33, 14.67] |
Joint6 |
0 |
0 |
100 |
0 |
Link6 |
0.261 |
[-0.05, -1.11, -20.05] |
Tabelle 2.4-2 DH-Parameter des kollaborativen Roboters FR3-WMS
Kinematik |
theta[rad] |
a[mm] |
d[mm] |
alpha[rad] |
Dynamik |
Masse[kg] |
Massenschwerpunkt[mm] |
Joint1 |
0 |
140 |
0 |
π/2 |
Link1 |
1.66 |
[-0.06, -13.58, 1.68] |
Joint2 |
0 |
0 |
-280 |
0 |
Link2 |
3.68 |
[140.11, 0, 101.71] |
Joint3 |
0 |
0 |
-240 |
0 |
Link3 |
1.81 |
[63.49, 0.1, 10.94] |
Joint4 |
0 |
102 |
0 |
π/2 |
Link4 |
1.18 |
[0.07, -2.18, 12.48] |
Joint5 |
0 |
102 |
0 |
-π/2 |
Link5 |
1.18 |
[-0.07, 2.18, 12.48] |
Joint6 |
0 |
100 |
0 |
0 |
Link6 |
0.28 |
[1.81, 1.33, -20.41] |
Tabelle 2.4-3 DH-Parameter des kollaborativen Roboters FR3-WML
Kinematik |
theta[rad] |
a[mm] |
d[mm] |
alpha[rad] |
Dynamik |
Masse[kg] |
Massenschwerpunkt[mm] |
Joint1 |
0 |
140 |
0 |
π/2 |
Link1 |
1.54 |
[-0.01, -14.27, 1.37] |
Joint2 |
0 |
0 |
-425 |
0 |
Link2 |
3.49 |
[212.5, 0, 101.43] |
Joint3 |
0 |
0 |
-395 |
0 |
Link3 |
2 |
[114.17, 0.08, 9.92] |
Joint4 |
0 |
102 |
0 |
π/2 |
Link4 |
1.17 |
[0.07, -2.18, 12.48] |
Joint5 |
0 |
102 |
0 |
-π/2 |
Link5 |
1.17 |
[-0.07, 2.18, 12.48] |
Joint6 |
0 |
100 |
0 |
0 |
Link6 |
0.28 |
[1.9, 1.6, -20.08] |
Tabelle 2.4-4 DH-Parameter des kollaborativen Roboters FR3-C
Kinematik |
theta[rad] |
a[mm] |
d[mm] |
alpha[rad] |
Dynamik |
Masse[kg] |
Massenschwerpunkt[mm] |
Joint1 |
0 |
140 |
0 |
π/2 |
Link1 |
1.69 |
[-0.16, -13.99, 1.53] |
Joint2 |
0 |
0 |
-280 |
0 |
Link2 |
3.73 |
[140, 0, 101.34] |
Joint3 |
0 |
0 |
-240 |
0 |
Link3 |
1.84 |
[63.24, 0.08, 11.04] |
Joint4 |
0 |
102 |
0 |
π/2 |
Link4 |
1.2 |
[0.1, -2.03, 12.55] |
Joint5 |
0 |
102 |
0 |
-π/2 |
Link5 |
1.2 |
[-0.1, 2.03, 12.55] |
Joint6 |
0 |
100 |
0 |
0 |
Link6 |
0.53 |
[1.48, 1.54, -17.9] |
Tabelle 2.4-5 DH-Parameter des kollaborativen Roboters FR5
Kinematik |
theta[rad] |
a[mm] |
d[mm] |
alpha[rad] |
Dynamik |
Masse[kg] |
Massenschwerpunkt[mm] |
Joint1 |
0 |
0 |
152 |
π/2 |
Link1 |
4.64 |
[-0.19, -18.28, 2.26] |
Joint2 |
0 |
-425 |
0 |
0 |
Link2 |
10.08 |
[212.47, 0, 121.2] |
Joint3 |
0 |
-395 |
0 |
0 |
Link3 |
2.71 |
[122.62, 0.17, 12.59] |
Joint4 |
0 |
0 |
102 |
π/2 |
Link4 |
1.56 |
[0.05, -2.33, 14.68] |
Joint5 |
0 |
0 |
102 |
-π/2 |
Link5 |
1.56 |
[-0.05, 2.33, 14.68] |
Joint6 |
0 |
0 |
100 |
0 |
Link6 |
0.36 |
[0.93, 0.81, -20.05] |
Tabelle 2.4-6 DH-Parameter des kollaborativen Roboters FR5-C
Kinematik |
theta[rad] |
a[mm] |
d[mm] |
alpha[rad] |
Dynamik |
Masse[kg] |
Massenmittelpunkt[mm] |
Gelenk1 |
0 |
0 |
140 |
π/2 |
Verbindung1 |
1.76 |
[-0.09, -15.66, 1.53] |
Gelenk2 |
0 |
-280 |
0 |
0 |
Verbindung2 |
3.98 |
[211.32, 0, 101.13] |
Gelenk3 |
0 |
-240 |
0 |
0 |
Verbindung3 |
2.08 |
[102.62, 0.12, 11.26] |
Gelenk4 |
0 |
0 |
102 |
π/2 |
Verbindung4 |
1.33 |
[0.09, -1.86, 13.76] |
Gelenk5 |
0 |
0 |
102 |
-π/2 |
Verbindung5 |
1.33 |
[-0.09, 1.86, 13.76] |
Gelenk6 |
0 |
0 |
100 |
0 |
Verbindung6 |
0.28 |
[-0.26, 1.75, -20.50] |
Tabelle 2.4-7 DH-Parameter des kollaborativen Roboters FR5-WML
Kinematik |
theta[rad] |
a[mm] |
d[mm] |
alpha[rad] |
Dynamik |
Masse[kg] |
Massenschwerpunkt[mm] |
Joint1 |
0 |
180 |
0 |
π/2 |
Link1 |
11.49 |
[-0.16, -28.51, 4.16] |
Joint2 |
0 |
0 |
-970 |
0 |
Link2 |
21.3 |
[642.59, 0.04, 165.62] |
Joint3 |
0 |
0 |
-816 |
0 |
Link3 |
4.61 |
[321.39, 0.16, 52.76] |
Joint4 |
0 |
159 |
0 |
π/2 |
Link4 |
1.66 |
[0.21, -3.06, 13.07] |
Joint5 |
0 |
114 |
0 |
-π/2 |
Link5 |
1.66 |
[-0.21, 3.06, 13.07] |
Joint6 |
0 |
160 |
0 |
0 |
Link6 |
0.36 |
[1.45, 1.09, -19.98] |
Tabelle 2.4-8 DH-Parameter des kollaborativen Roboters FR10
Kinematik |
theta[rad] |
a[mm] |
d[mm] |
alpha[rad] |
Dynamik |
Masse[kg] |
Massenschwerpunkt[mm] |
Joint1 |
0 |
0 |
180 |
π/2 |
Link1 |
11.97 |
[-0.10, -26.12, 4.04] |
Joint2 |
0 |
-700 |
0 |
0 |
Link2 |
19.59 |
[480.27, 0.01, 164.68] |
Joint3 |
0 |
-586 |
0 |
0 |
Link3 |
3.7 |
[211.22, 0.11, 54.21] |
Joint4 |
0 |
0 |
159 |
π/2 |
Link4 |
1.69 |
[0.12, -3, 12.18] |
Joint5 |
0 |
0 |
114 |
-π/2 |
Link5 |
1.69 |
[-0.12, 3, 12.18] |
Joint6 |
0 |
0 |
106 |
0 |
Link6 |
0.35 |
[1.24, 0.85, -20.34] |
Tabelle 2.4-9 DH-Parameter des kollaborativen Roboters FR16
Kinematik |
theta[rad] |
a[mm] |
d[mm] |
alpha[rad] |
Dynamik |
Masse[kg] |
Massenschwerpunkt[mm] |
Joint1 |
0 |
0 |
180 |
π/2 |
Link1 |
11.97 |
[-0.10, -26.12, 4.04] |
Joint2 |
0 |
-520 |
0 |
0 |
Link2 |
18.18 |
[364.4, 0.01, 163.09] |
Joint3 |
0 |
-400 |
0 |
0 |
Link3 |
3.22 |
[135.03, 0.12, 55.58] |
Joint4 |
0 |
0 |
159 |
π/2 |
Link4 |
1.69 |
[0.12, -3, 12.18] |
Joint5 |
0 |
0 |
114 |
-π/2 |
Link5 |
1.69 |
[-0.12, 3, 12.18] |
Joint6 |
0 |
0 |
106 |
0 |
Link6 |
0.35 |
[1.24, 0.85, -20.34] |
Tabelle 2.4-10 DH-Parameter des kollaborativen Roboters FR20
Kinematik |
theta[rad] |
a[mm] |
d[mm] |
alpha[rad] |
Dynamik |
Masse[kg] |
Massenschwerpunkt[mm] |
Joint1 |
0 |
0 |
215 |
π/2 |
Link1 |
20.79 |
[-0.19, -36.57, 5.68] |
Joint2 |
0 |
-1000 |
0 |
0 |
Link2 |
42.84 |
[605.25, 0.06, 202.94] |
Joint3 |
0 |
-716 |
0 |
0 |
Link3 |
9.88 |
[262.84, 0.22, 43.08] |
Joint4 |
0 |
0 |
166 |
π/2 |
Link4 |
4.64 |
[0.23, -2.28, 18.42] |
Joint5 |
0 |
0 |
138 |
-π/2 |
Link5 |
4.64 |
[-0.23, 2.28, 18.42] |
Joint6 |
0 |
0 |
120 |
0 |
Link6 |
0.6 |
[-2.11, -1.96, -20.38] |
Tabelle 2.4-11 DH-Parameter des kollaborativen Roboters FR30
Kinematik |
theta[rad] |
a[mm] |
d[mm] |
alpha[rad] |
Dynamik |
Masse[kg] |
Massenschwerpunkt[mm] |
Joint1 |
0 |
0 |
215 |
π/2 |
Link1 |
20.64 |
[-0.22, -37.39, 5.59] |
Joint2 |
0 |
-700 |
0 |
0 |
Link2 |
36.37 |
[440.73, 0.05, 198.7] |
Joint3 |
0 |
-536 |
0 |
0 |
Link3 |
8.41 |
[185.64, 0.25, 45.82] |
Joint4 |
0 |
0 |
166 |
π/2 |
Link4 |
4.64 |
[0.23, -2.29, 18.60] |
Joint5 |
0 |
0 |
138 |
-π/2 |
Link5 |
4.64 |
[-0.23, 2.29, 18.60] |
Joint6 |
0 |
0 |
120 |
0 |
Link6 |
0.6 |
[-2.11, -1.96, -20.38] |