1. Überblick
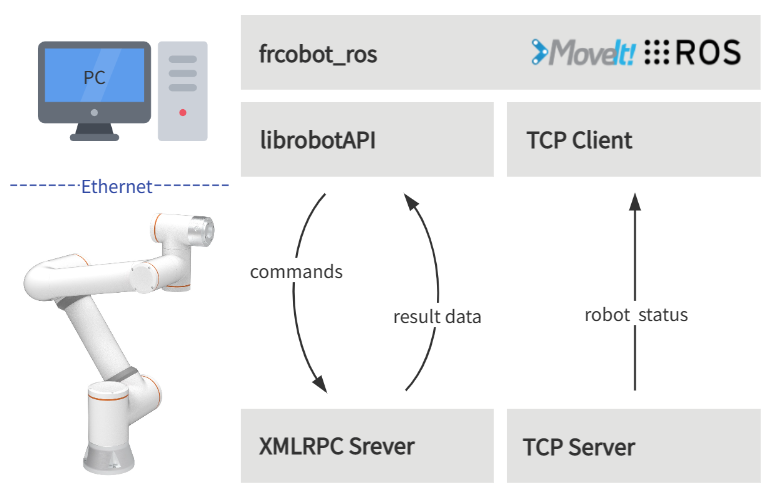
Die vereinfachte Architektur von frcobot_ros ist unten dargestellt. Die Seite des kollaborativen Roboters stellt einen XMLRPC-Server und einen TCP-Server bereit.
Der XMLRPC-Server bietet hauptsächlich die Roboter-Befehlsschnittstelle zur Ausführung von Roboterbewegungen und zum Abrufen von Zustandswerten.
Der TCP-Server für die Statusrückmeldung bietet eine Echtzeit-Rückmeldung des Roboterzustands mit einem Rückmeldezyklus von 8 ms.
Auf dem Benutzer-PC wurden ROS und Moveit! installiert und frcobot_ros kompiliert. In frcobot_ros enthält jedes Funktionspaket die lib-Bibliothek der Roboter-API sowie einen TCP-Client, der in frcobot_hw die Kommunikation mit dem Statusrückmelde-Server des Roboters herstellt, um die Roboter-Statusrückmeldedaten zu empfangen.
2. Installation
Dieses Kapitel beschreibt, wie frcobot_ros erstellt wird und welche Installationsumgebung erforderlich ist.
2.1. Systemvoraussetzungen
Die empfohlene Umgebung für frcobot_ros ist wie folgt:
Bemerkung
Ubuntu 18.04 LTS Bionic Beaver und ROS Melodic Morenia
Ubuntu 20.04 LTS Focal Fossa und ROS Noetic Ninjemys
Die folgenden Anweisungen gelten für Ubuntu 20.04 LTS und ROS Noetic Ninjemys. Wenn Sie Melodic verwenden, ersetzen Sie in den folgenden Befehlszeilen noetic durch melodic.
2.2. ROS-Installationsanforderungen
Nach der Installation des Ubuntu-Systems installieren und konfigurieren Sie die ROS Noetic-Umgebung.
Nach der Konfiguration von ROS Noetic installieren Sie die folgende erforderliche Umgebung:
1echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
2source ~/.bashrc
3sudo apt-get install -y \
4 ros-noetic-rosparam-shortcuts \
5 ros-noetic-ros-control \
6 ros-noetic-ros-controllers \
7 ros-noetic-moveit \
8 libxmlrpcpp-dev
2.3. ROS-Pakete kompilieren
Erstellen Sie nach korrekter Installation und Konfiguration von ROS Noetic in einem Verzeichnis Ihrer Wahl einen Catkin-Arbeitsbereich.
1mkdir -p ~/catkin_ws/src
2cd ~/catkin_ws
3catkin_init_workspace src
Klonen Sie dann die frcobot_ros-Bibliothek von Gitee.
1cd ~/catkin_ws/src
2git clone https://gitee.com/fair-innovation/frcobot_ros.git
Erstellen Sie die frcobot_ros-Pakete.
1cd ~/catkin_ws
2catkin_make
3echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
4source ~/.bashrc
Wenn Fehler auftreten, überprüfen Sie bitte, ob alle Pakete aus den ROS-Installationsanforderungen erfolgreich installiert wurden. Kopieren Sie nach erfolgreicher Kompilierung die lib-Bibliothek in die ROS-lib-Umgebung (Pfad: /opt/ros/noetic/lib), damit das Programm normal ausgeführt werden kann.
1# Der Standardpfad für catkin_ws ist hier "~". Wenn dies abweicht, ersetzen Sie "~" einfach durch den tatsächlichen Pfad.
2sudo cp ~/catkin_ws/src/frcobot_ros/frcobot_hw/lib/* /opt/ros/noetic/lib
3. Schnellstart
3.1. frcobot_hw
frcobot_hw bietet hauptsächlich die grundlegenden Funktionen für die Kommunikation mit dem kollaborativen Roboter.
Bemerkung
Enthält die msg für die Statusrückmeldung des kollaborativen Roboters.
Bietet Befehlsdemonstrationen zur Steuerung des kollaborativen Roboters.
Bietet einen Statusrückmeldeknoten und Topics für den kollaborativen Roboter.
Über eine Launch-Datei können der Statusserver und die Befehlsdemonstration schnell gestartet werden.
Der Inhalt von frcobot_hw.launch ist wie folgt:
1<launch>
2
3 <!-- params -->
4 <param name="robot_ip" type="string" value="192.168.58.2"/>
5 <param name="robot_port" type="int" value="8083"/>
6
7 <!-- frcobot status node -->
8 <node pkg="frcobot_hw" type="frcobot_status_node" name="frcobot_status_node" output="screen" />
9
10 <!-- frcobot control demo -->
11 <node pkg="frcobot_hw" type="frcobot_cmd_demo" name="frcobot_cmd_demo" output="screen" />
12
13</launch>
Wichtig
robot_ipundrobot_portmüssen mit der IP und dem Port des zu steuernden kollaborativen Roboters übereinstimmen.Die Standard-IP des Roboters ab Werk ist 192.168.58.2, der Port für die Benutzer-Statusrückmeldung ist 8083.
Mit dem folgenden Befehl können der Roboterrückmeldeknoten und die Befehlsdemonstration schnell gestartet werden.
1roslaunch frcobot_hw frcobot_hw.launch
Öffnen Sie ein neues Terminal, um die Echtzeit-Statusrückmeldedaten mit dem folgenden Befehl auszugeben und anzuzeigen.
1rostopic echo /frcobot_status