1. Plugin-Einführung
Das FAIRINO MoveIt2-Plugin ist ein Plugin, das die Bewegungssteuerung und Bahnplanung für FAIRINO-Roboter unterstützt. Mit dem FAIRINO MoveIt2-Plugin können komplexe Roboter-Bewegungssteuerungen, Bahnplanungen, inverse kinematische Berechnungen und Echtzeit-Kollisionserkennungen realisiert werden. Es eignet sich für verschiedene Anwendungsszenarien von Roboterarmen, wie Industrie, Schweißen, Fertigung, automatisiertes Be- und Entladen, Palettieren, Medizintechnik usw.
2. Schnellstart
Dieses Kapitel beschreibt, wie die Ausführungsumgebung der App konfiguriert wird.
Die Verwendung wird unter Ubuntu 22.04 LTS (Jammy) empfohlen. Nach der Systeminstallation kann ROS2 installiert werden. Die Verwendung von ROS2 Humble wird empfohlen. Eine Anleitung zur Installation von ROS2 finden Sie unter: https://docs.ros.org/en/humble/index.html.
2.1. Installation und Konfiguration des FAIRINO MoveIt2-Plugin-Pakets
2.1.1. FAIRINO MoveIt2-Plugin klonen
Klonen Sie das FAIRINO MoveIt2-Plugin lokal und wechseln Sie dann per cd in das Zielverzeichnis. Die Hauptdateien umfassen:
fairino_msgs: Funktionspaket für Datentypen der FAIRINO-Roboter-Datenübertragung.
fairino_hardware: Funktionspaket für das FAIRINO fairino_hardware-Plugin.
fairino_robot/fairino_description: Funktionspaket für die visuelle Darstellung und URDF-Dateien der FAIRINO-Roboter.
fairino_robot/fairino3mt_v6_moveit2_config, fairino_robot/fairino3_v6_moveit2_config, fairino_robot/fairino5_v6_moveit2_config, fairino_robot/fairino10_v6_moveit2_config, fairino_robot/fairino16_v6_moveit2_config, fairino_robot/fairino20_v6_moveit2_config, fairino_robot/fairino30_v6_moveit2_config: MoveIt2-Konfigurationspakete für FAIRINO-Roboter.
fairino_robot/fairino_mtc_demo: Beispiel-Codepaket für MoveIt Task Constructor (MTC).


2.1.2. Funktionspakete kompilieren
Kompilieren des fairino_msgs-Funktionspakets
1cd ros2_ws
2colcon build --packages-select fairino_msgs
3source install/setup.bash
Kompilieren des fairino_hardware-Funktionspakets
1cd ros2_ws
2colcon build --packages-select fairino_hardware
3source install/setup.bash
Kompilieren des fairino_description-Funktionspakets
1cd ros2_ws
2colcon build --packages-select fairino_description
3source install/setup.bash
Kompilieren des MoveIt2-Konfigurationspakets für FAIRINO-Roboter, am Beispiel von fairino5_v6_moveit2_config
1cd ros2_ws
2colcon build --packages-select fairino5_v6_moveit2_config
3source install/setup.bash
Kompilieren des Beispiel-Codepakets fairino_mtc_demo. Falls dieses Beispielpaket nicht im offiziellen ros2_ws-Arbeitsbereich vorhanden ist, kann es über den Kundendienst bezogen werden.
1cd ros2_ws
2colcon build --packages-select fairino_mtc_demo
3source install/setup.bash
2.2. Konfiguration des MoveIt2-Modells für den FAIRINO-Roboterarm
Wenn Sie nicht das offizielle, vom Roboter bereitgestellte moveit2_config-Konfigurationspaket verwenden möchten, können Sie mit moveit_setup_assistant ein benutzerdefiniertes moveit2_config-Konfigurationspaket für Ihren Roboter erstellen.
2.2.1. Arbeitsbereich erstellen
Erstellen Sie einen Arbeitsbereich und ein Funktionspaket.
1mkdir -p test_fa_ws/src
2cd test_fa_ws/src
3mkdir fairino5_v6_robot_moveit_config
4cd ..
5cd ..
Kompilieren Sie das Funktionspaket und führen Sie source aus.
1colcon build
2source install/setup.bash
Starten Sie moveit_setup_assistant für die Roboter-Konfiguration.
1ros2 launch moveit_setup_assistant setup_assistant.launch.py
2.2.2. Roboter konfigurieren
Konfigurationsoberfläche starten
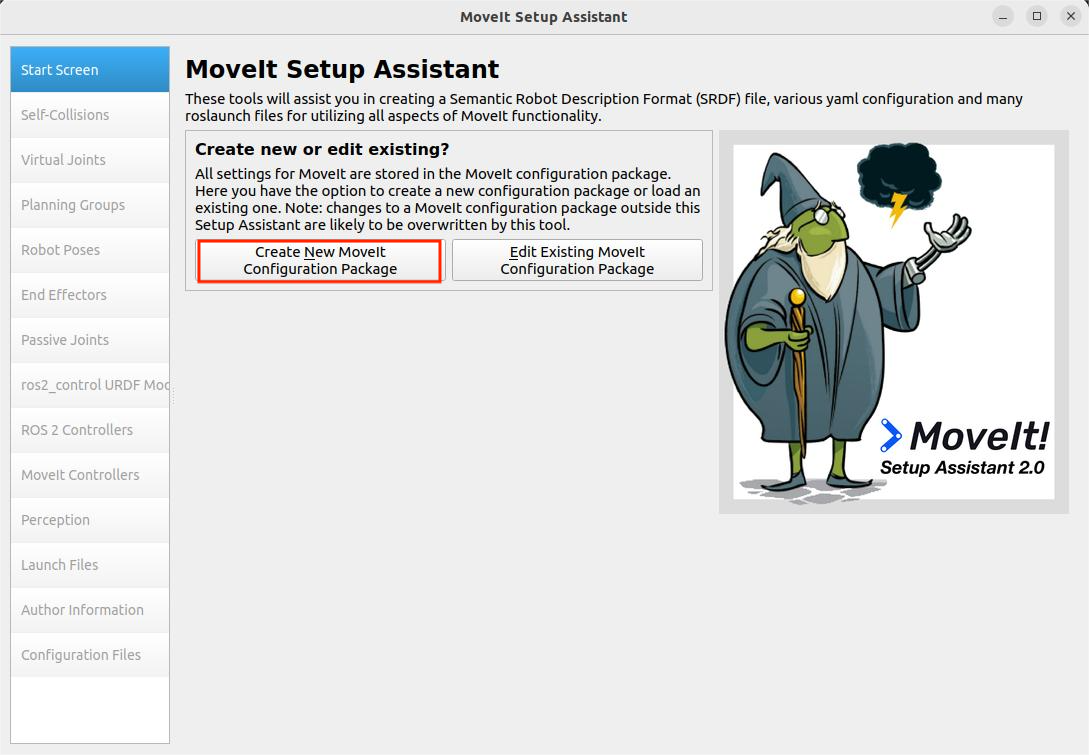
Öffnen Sie ein Terminal im Verzeichnis test_fa_ws. Wählen Sie in der Konfigurationsoberfläche „Create New Moveit Configuration Package“, um ein neues MoveIt-Konfigurationsfunktionspaket zu erstellen.
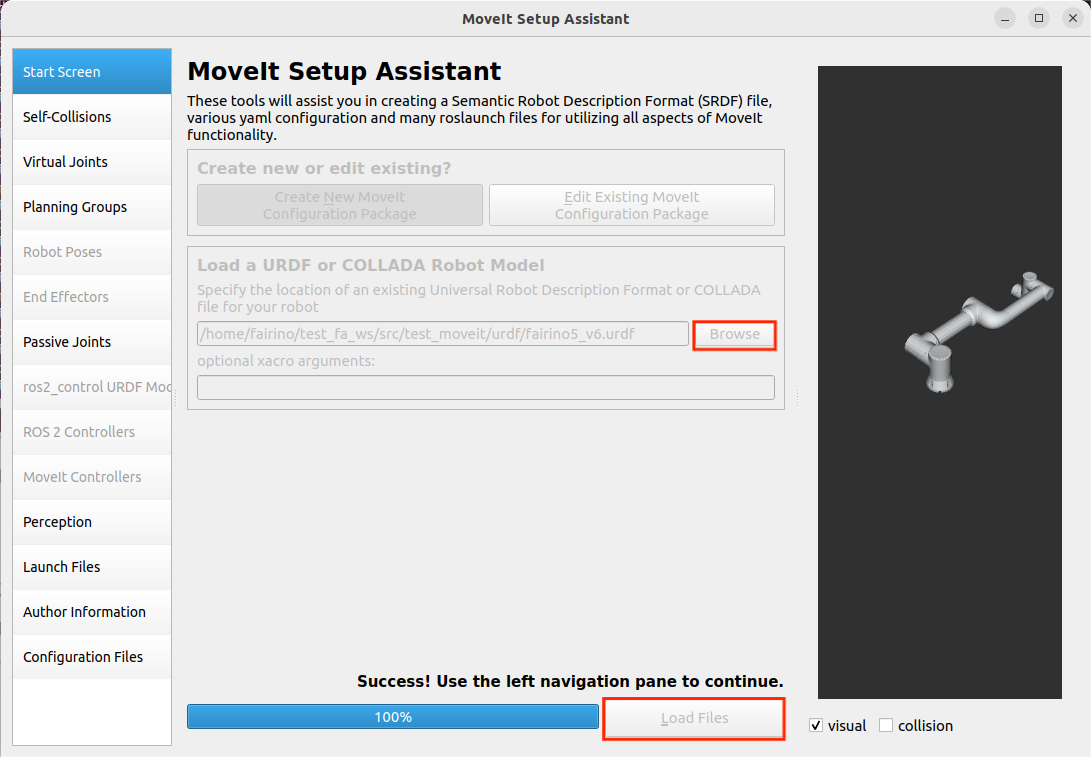
Wählen Sie dann die Beschreibungsdatei des Roboters, d.h. die .urdf-Datei, aus. Klicken Sie dann auf „Load Files“, um das Robotermodell zu laden. Das Robotermodell sollte daraufhin auf der rechten Seite angezeigt werden.
Self-Collisions konfigurieren
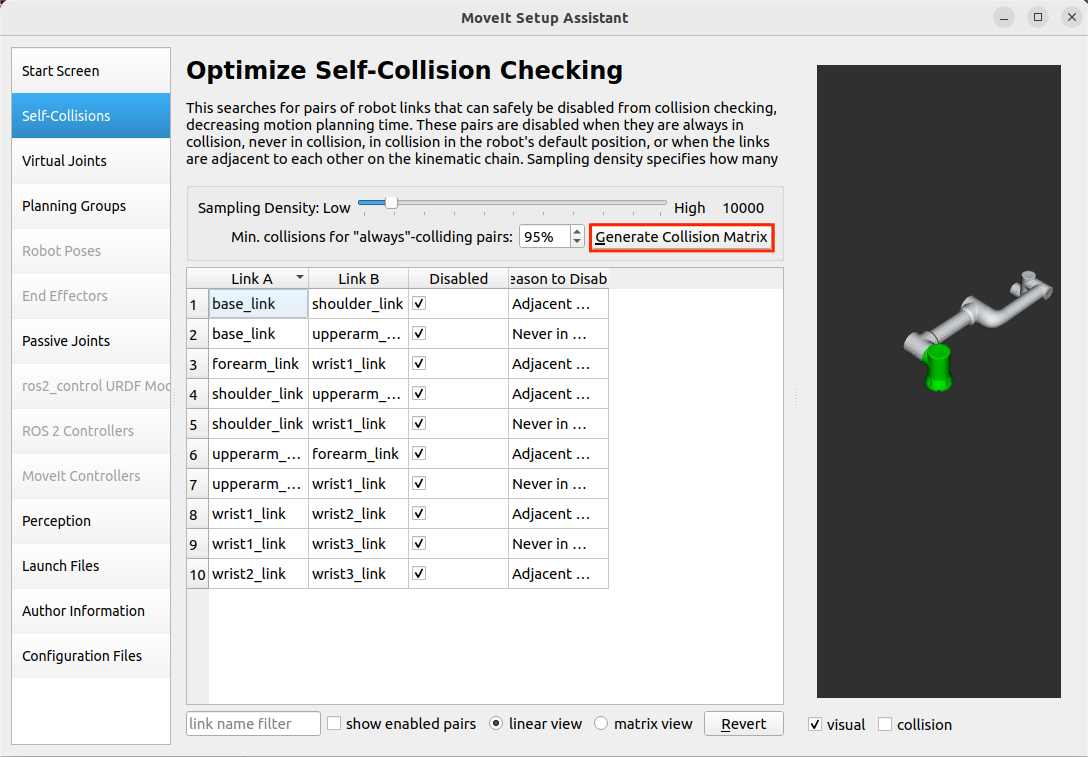
„Self-Collisions“ dient der Roboter-Kollisionseinstellung. Ein Klick auf „Generate Collision Matrix“ generiert automatisch die Kollisionsmatrix der Gelenke. Dabei wird die Kollisionserkennung zwischen sich berührenden Verbindungen sowie zwischen Verbindungen, die sich niemals berühren können, deaktiviert. Dies konfiguriert die Kollisionsmatrix der Robotergelenke und vermeidet so die Berechnung von Kollisionen zwischen sich berührenden Flächen. Ein Klick auf „Generate Collision Matrix“ genügt.
Virtual Joints konfigurieren
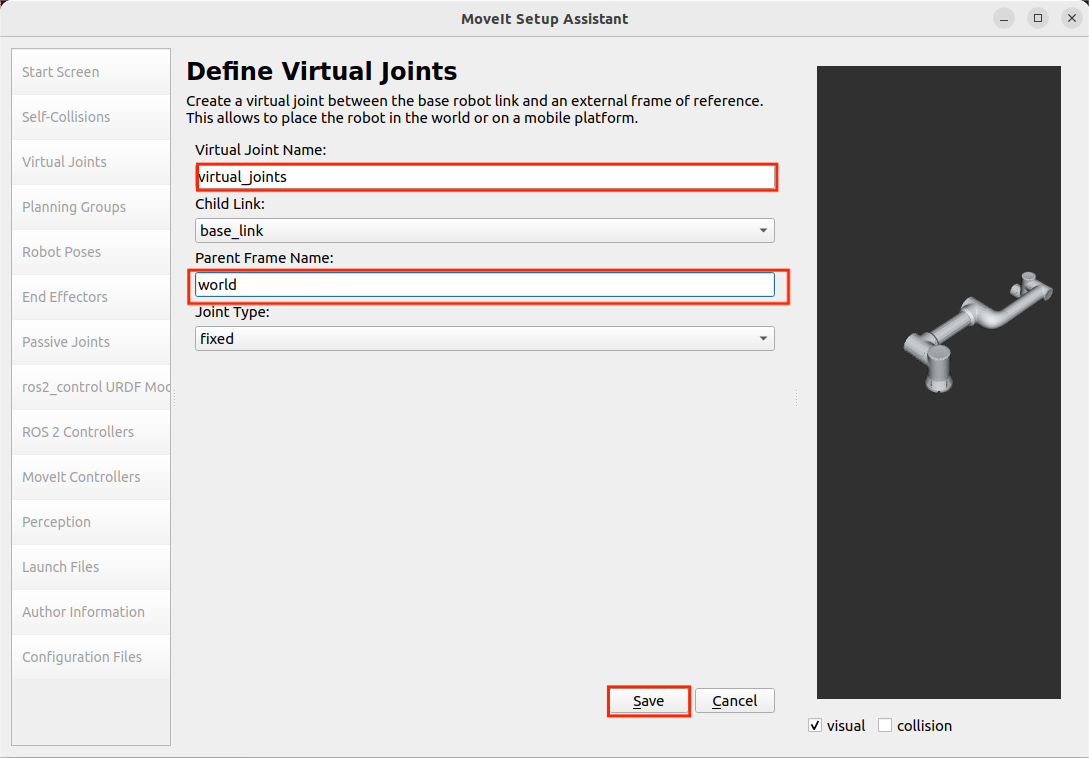
„Virtual Joints“ sind virtuelle Achsen des Roboters. Wenn der Roboter auf einer mobilen Plattform montiert ist, müssen virtuelle Achsen für ihn eingerichtet werden. Dazu gehören Name der virtuellen Achse, das verbundene Kindglied, der Gelenktyp usw. Wenn sich die mobile Plattform bewegt, bewegen sich die virtuellen Achsen synchron und bewegen so den Roboter. Dies realisiert die Funktion, dass der Roboter sich mit der mobilen Plattform bewegt. In diesem Fall wird der Roboter direkt im Weltkoordinatensystem (world) platziert und virtual_joints genannt.
Planning Groups konfigurieren
„Planning Groups“ sind die Planungsgruppen des Roboters. Gelenke, die bei der kinematischen Berechnung gemeinsam betrachtet werden müssen, werden innerhalb derselben Planungsgruppe zusammengefasst, um gemeinsame Vorwärts- und inverse kinematische Berechnungen durchzuführen. Beispielsweise könnten die vier Gelenke eines AGV-Fahrzeugs in einer Planungsgruppe, die sechs Gelenke eines Roboters in einer anderen und ein Gelenk eines Greifers in einer dritten Gruppe für die kinematische Berechnung zusammengefasst werden.
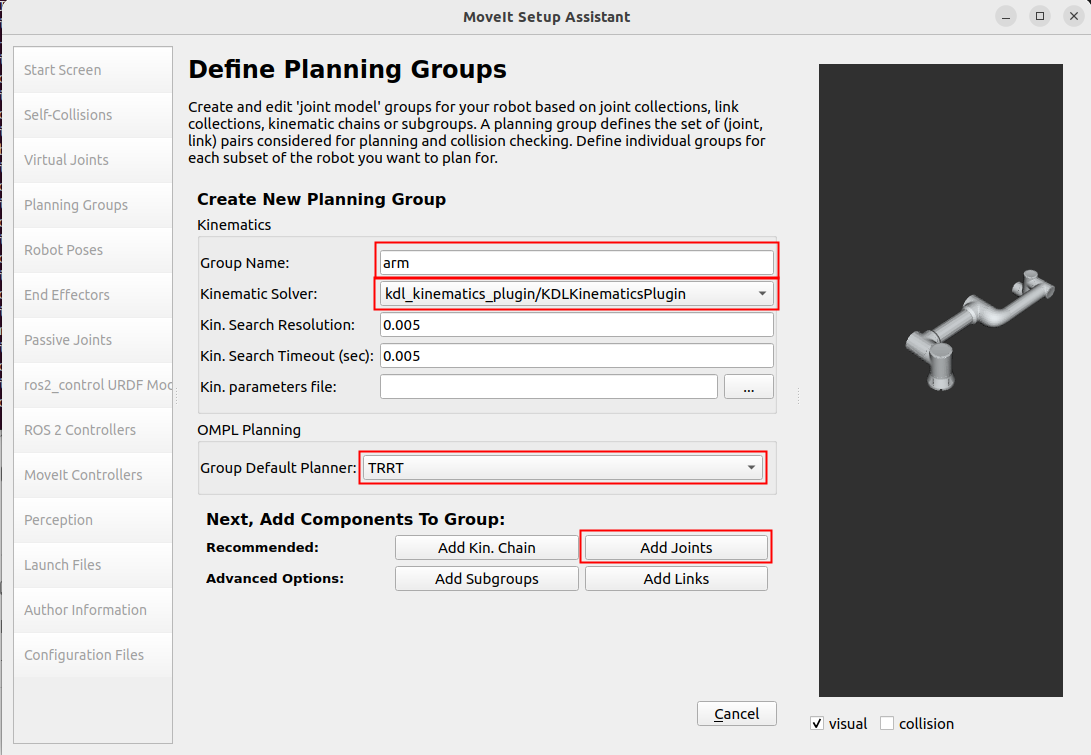
Da in diesem Fall kein Greifer verwendet wird, wird nur die Gelenkgruppe des Roboters, die arm-Gruppe, hinzugefügt. Fügen Sie zunächst die arm-Gruppe hinzu. Wählen Sie als Kinematik-Solver (Kinematic Solver) kdl_kinematics_plugin/KDLKinematicsPlugin aus. Wählen Sie dann als Standard-Planer (Group Default Planner) TRRT aus. Klicken Sie dann auf „Add Joints“, um der Planungsgruppe Gelenke hinzuzufügen.
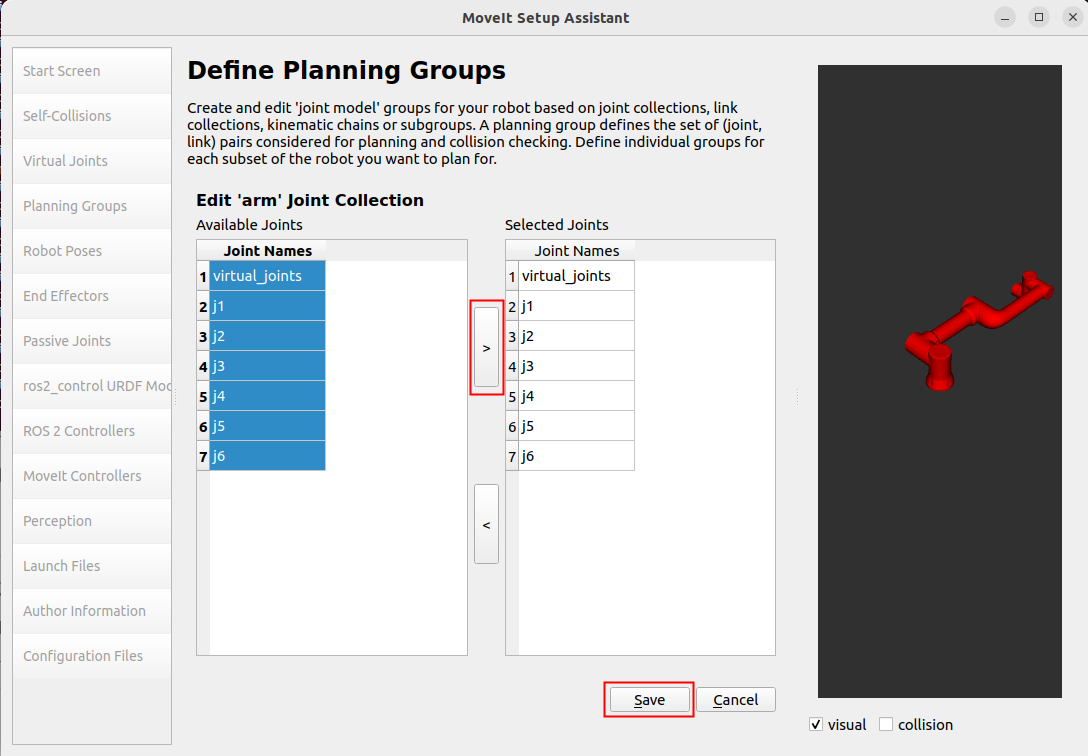
Halten Sie die Umschalttaste (Shift) gedrückt, um mehrere Gelenke des arm auszuwählen. Klicken Sie auf ‚>‘, um sie hinzuzufügen, und dann auf „save“, um zu speichern.
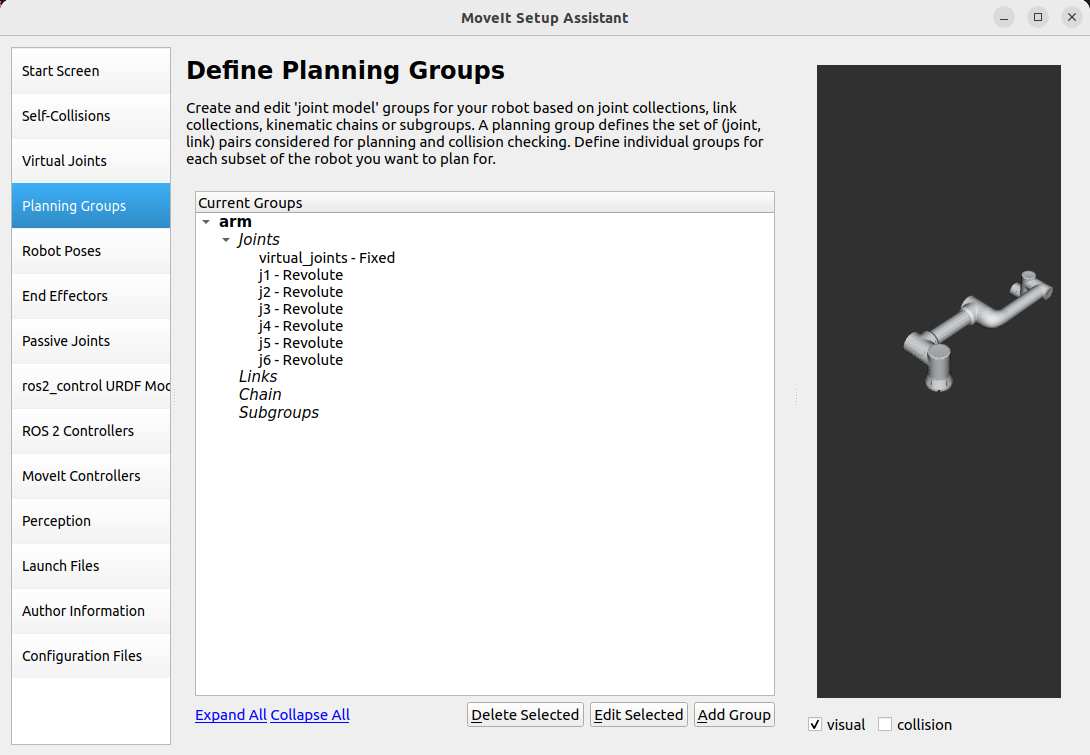
Die definierte Planungsgruppe sieht wie folgt aus:
Robot Poses konfigurieren
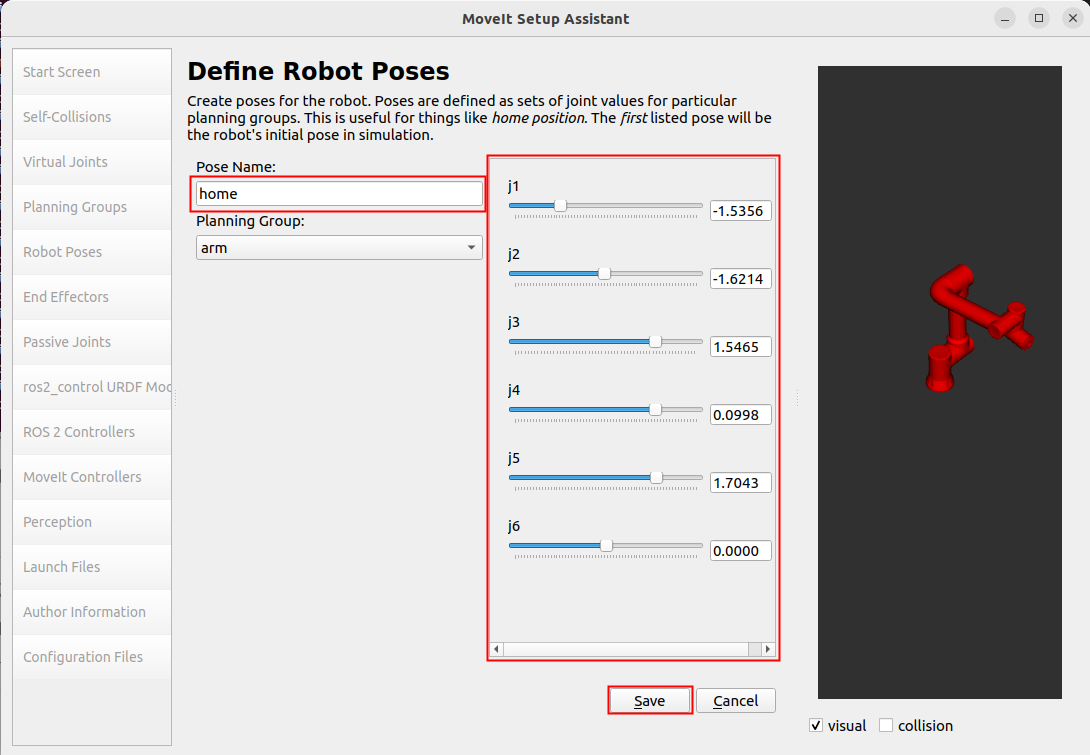
„Robot Poses“ sind vordefinierte Posen des Roboters. Sie definieren einige voreingestellte Posen für jede Planungsgruppe. Definieren Sie eine home-Pose für den arm. Diese Pose kann beliebig gewählt werden.
Mit „Robot Poses“ können für jede Planungsgruppe voreingestellte Posen definiert werden. Wenn der Roboter einen Greifer enthält, kann in „Planning Groups“ eine Greifer-Planungsgruppe hinzugefügt werden. Anschließend können bei der Einstellung der Posen in „Robot Poses“ auch Posen für den Greifer voreingestellt werden.
End Effectors konfigurieren
„End Effectors“ sind die Endeffektoren des Roboters. Die Planungsgruppe für den Endeffektor ist hier hand. Das standardmäßig verbundene Eltern-Glied (parent_link) ist panda_link8. Da in diesem Fall kein Endeffektor vorhanden ist, kann dieser Schritt übersprungen werden.
ros2_control URDF Modifications
„ros2_control URDF Modifications“ dient hauptsächlich zur Einstellung der Datentypen für die gesendeten Sollwerte und die rückgemeldeten Istwerte der Gelenke. Es kann zwischen Position, Geschwindigkeit und Drehmoment gewählt werden. In diesem Fall wird für beide, Soll- und Istwerte, die Positionsregelung gewählt. Klicken Sie dann einfach auf „Add interfaces“.
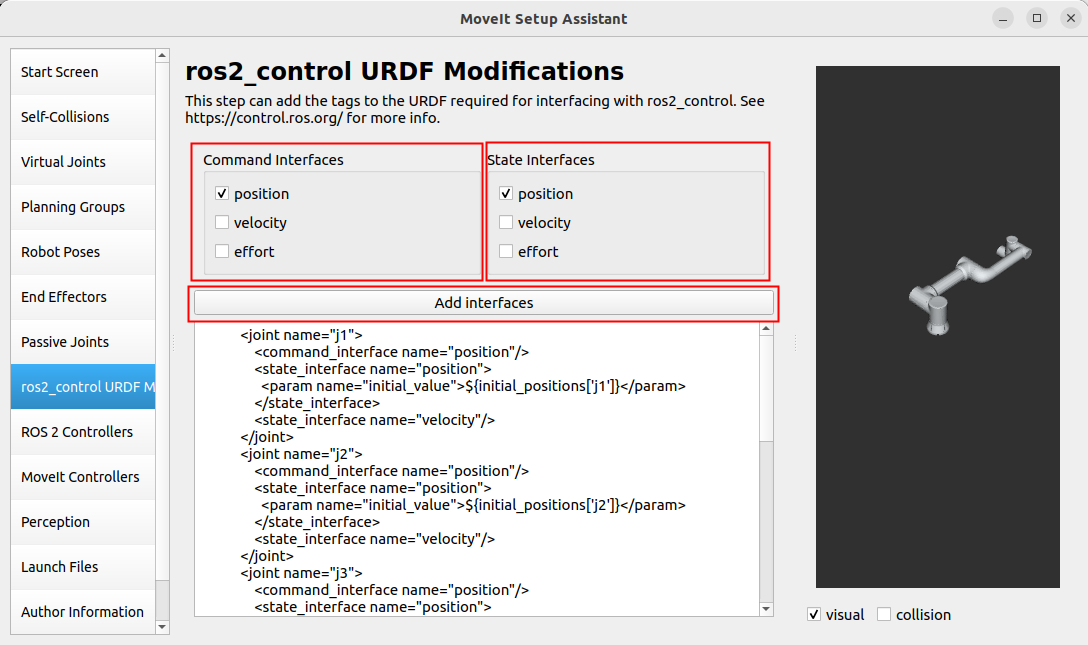
Wichtig
Hinweis:
Die Auswahl des Gelenkdatentyps muss mit dem später verwendeten fairino_hardware-Plugin übereinstimmen. Wählen Sie die Datentypen für Soll- und Istwerte der Gelenke basierend auf den vom fairino_hardware-Plugin übertragenen Daten aus. Da das fairino_hardware-Plugin, das die tatsächliche Roboterbewegung steuert, in diesem Fall den position-Datentyp verwendet, werden sowohl für Soll- als auch für Istwerte der Gelenke die Positionsregelung gewählt.
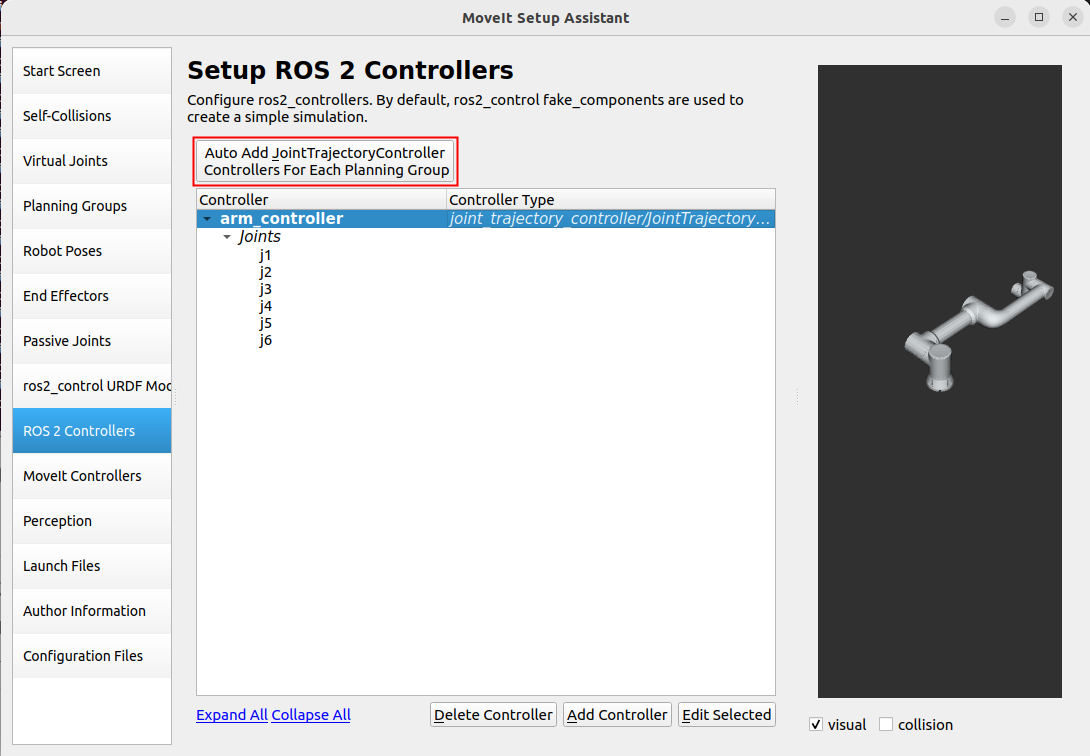
ROS 2 Controllers
„ROS 2 Controllers“ dient hauptsächlich zur Generierung der ros2_controllers.yaml-Datei. Diese Datei legt die Veröffentlichungsfrequenz, die Gelenknamen, die Controllernamen, die Controller-Typen usw. fest. Konfigurieren Sie „ROS 2 Controllers“, indem Sie für jede Planungsgruppe einen Controller konfigurieren. Klicken Sie dazu auf „Auto Add JointTrajectoryController Controllers For Each Planning Group“.
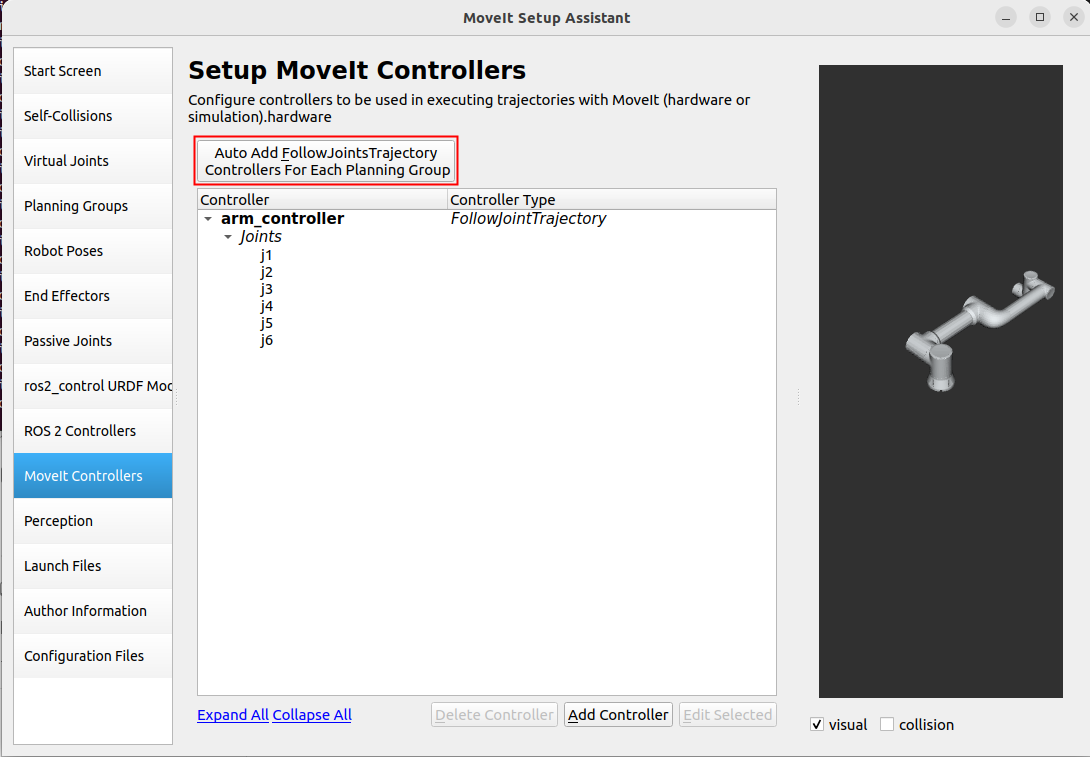
Moveit Controllers
„Moveit Controllers“ dient hauptsächlich zur Generierung der moveit_controllers-Datei. Diese Datei legt die Controllernamen, die Controller-Typen usw. fest. Es ist wichtig, dass die Controllernamen in moveit_controllers mit den Controllernamen in ros2_controllers übereinstimmen, da sonst ein reibungsloser Ablauf nicht gewährleistet ist.
Wenn die Controllernamen in moveit_controllers mit denen in ros2_controllers übereinstimmen, werden die Controller-Typen in moveit_controllers automatisch mit den Controller-Typen in ros2_controllers verknüpft. Dadurch werden die gesendeten Steuerdaten über moveit_controllers an ros2_controllers weitergeleitet und dann über das Plugin in ros2_controllers die tatsächliche Roboterbewegung angesteuert.
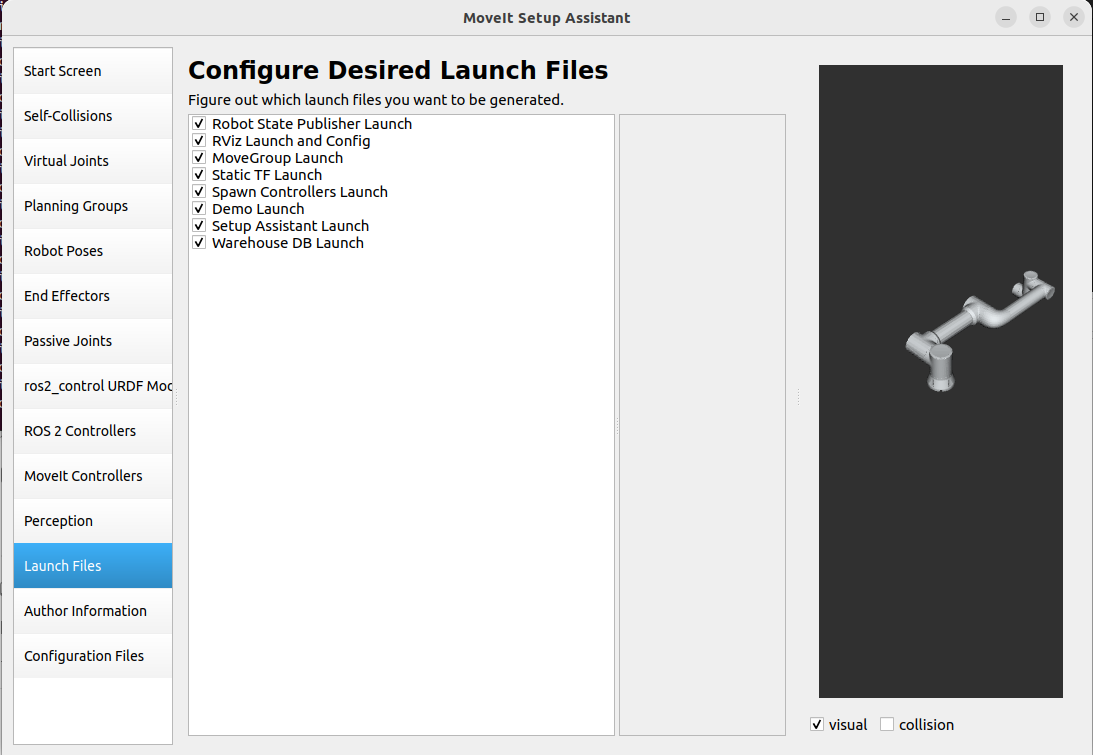
Launch Files
Konfigurieren Sie die Launch-Dateien. Die Standardkonfiguration kann verwendet werden.
Autoreninformationen
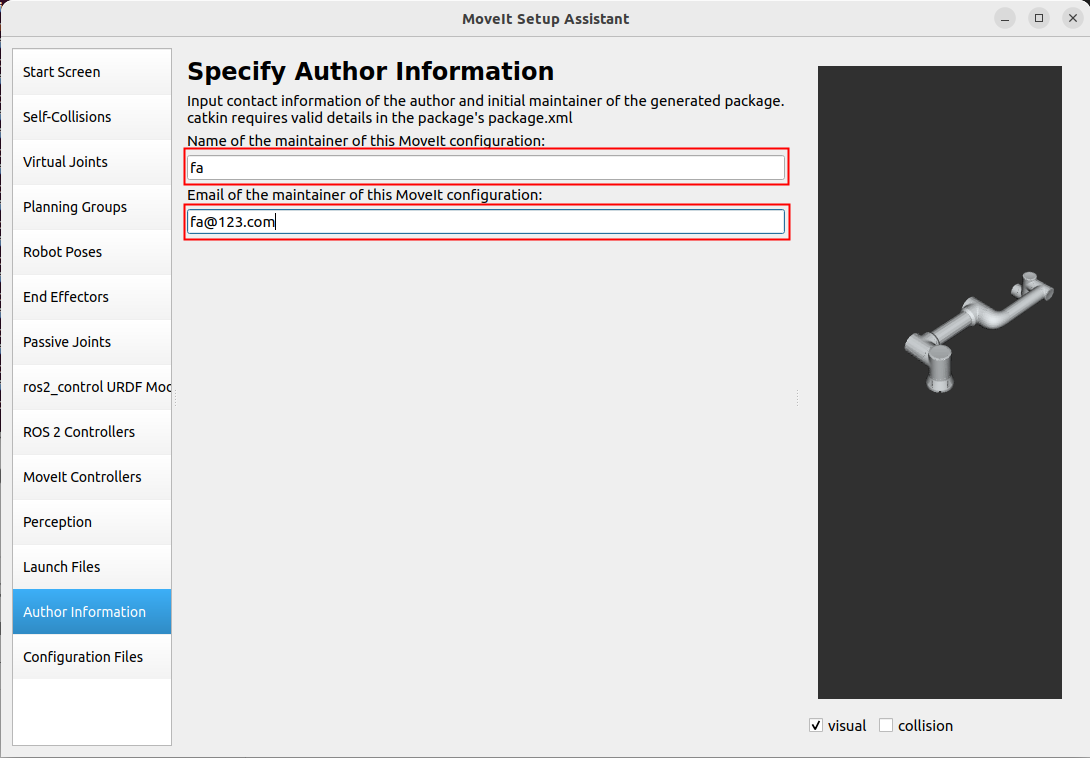
Launch-Dateien generieren
Generieren Sie die Launch-Dateien. Wählen Sie den Speicherort aus. Erstellen Sie in diesem Fall im Verzeichnis test_fa_ws/src einen Ordner namens fairino5_v6_robot_moveit_config zur Ablage der Konfigurationsdateien und wählen Sie dann „Generate“.
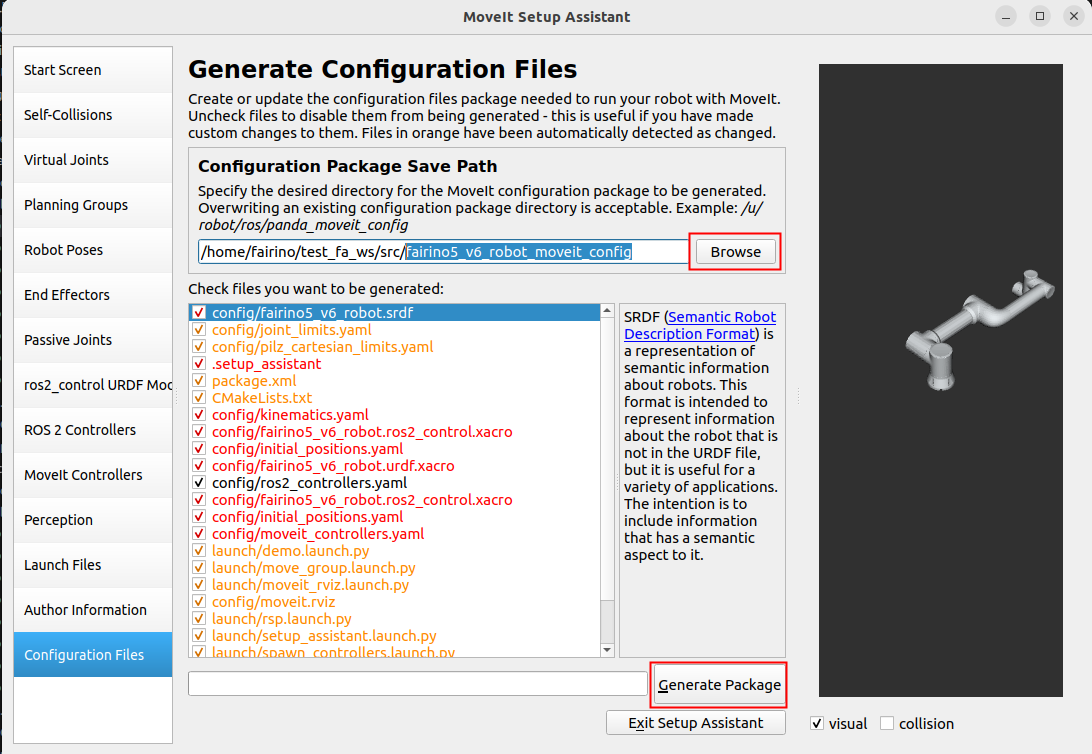
Da dies bereits einmal konfiguriert wurde, sollten bei einer Erstkonfiguration die Elemente unter „Check files you want to be generated“ schwarz sein, was bedeutet, dass die Launch-Dateien generiert werden können.
2.2.3. Launch starten
Nach Abschluss der Konfiguration kann das Funktionspaket kompiliert werden. Sie können das benutzerdefinierte MoveIt2-Konfigurationspaket des Roboters verwenden, um das offizielle FAIRINO MoveIt2-Konfigurationspaket zu ersetzen und so die Plug-in-Kompatibilität für benutzerdefinierte Roboter zu erreichen.
1colcon build --packages-select fairino5_v6_robot_moveit_config
2source install/setup.bash
Führen Sie dann direkt die soeben konfigurierte Launch-Datei aus.
1ros2 launch fairino5_v6_robot_moveit_config demo.launch.py
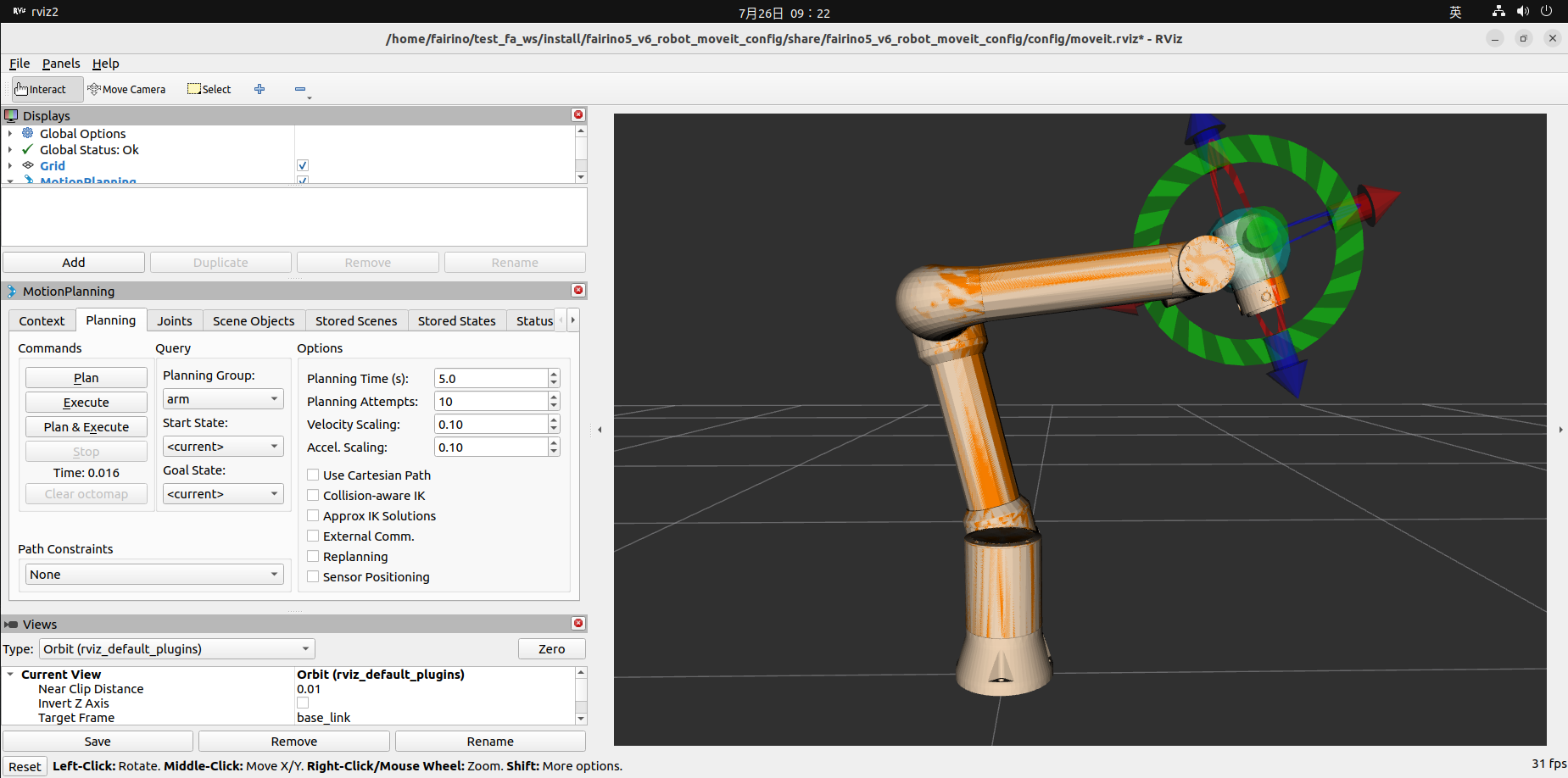
Die vollständig konfigurierte RViz2-Oberfläche wird angezeigt.
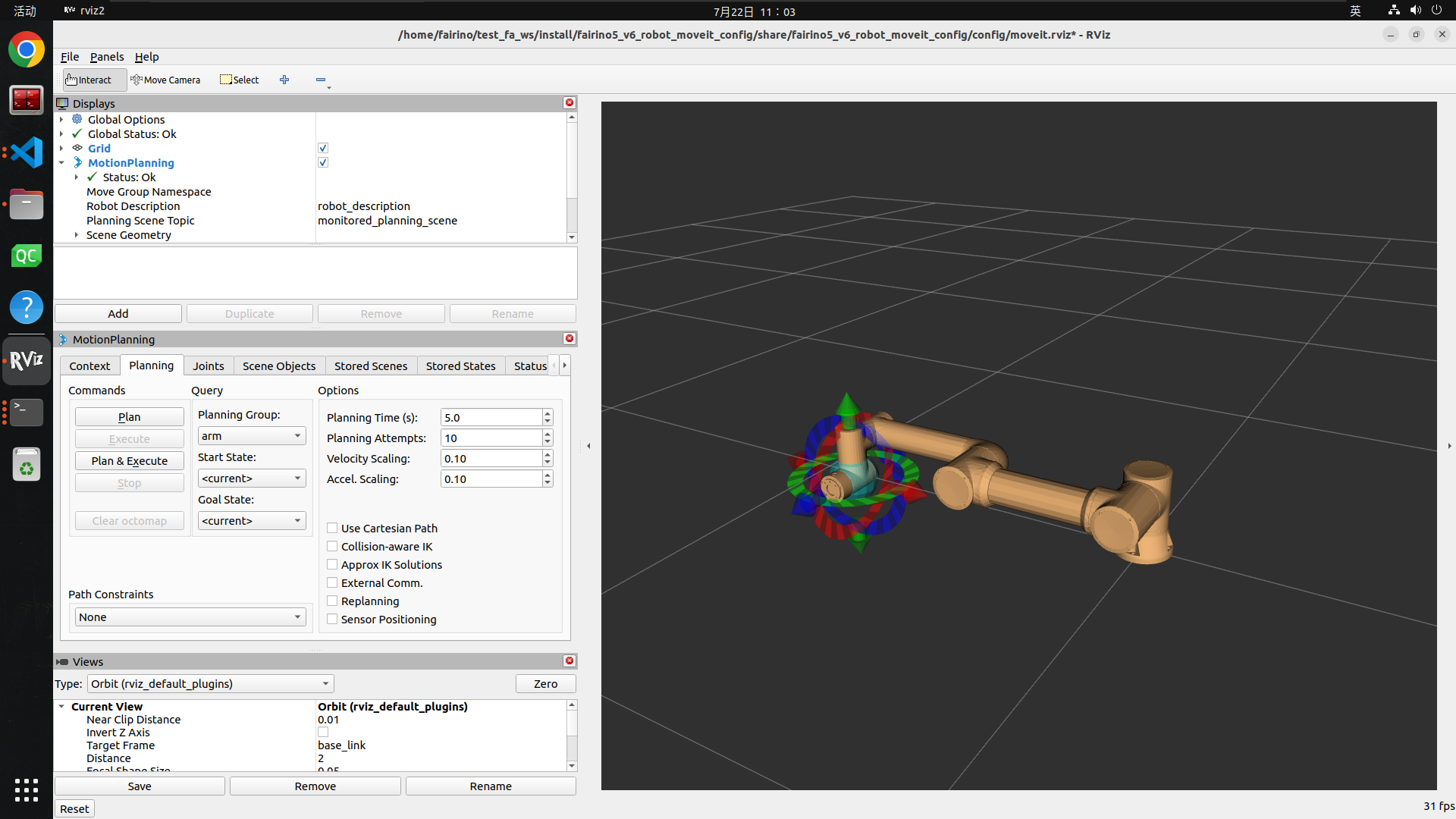
2.2.4. MoveIt2 verwenden
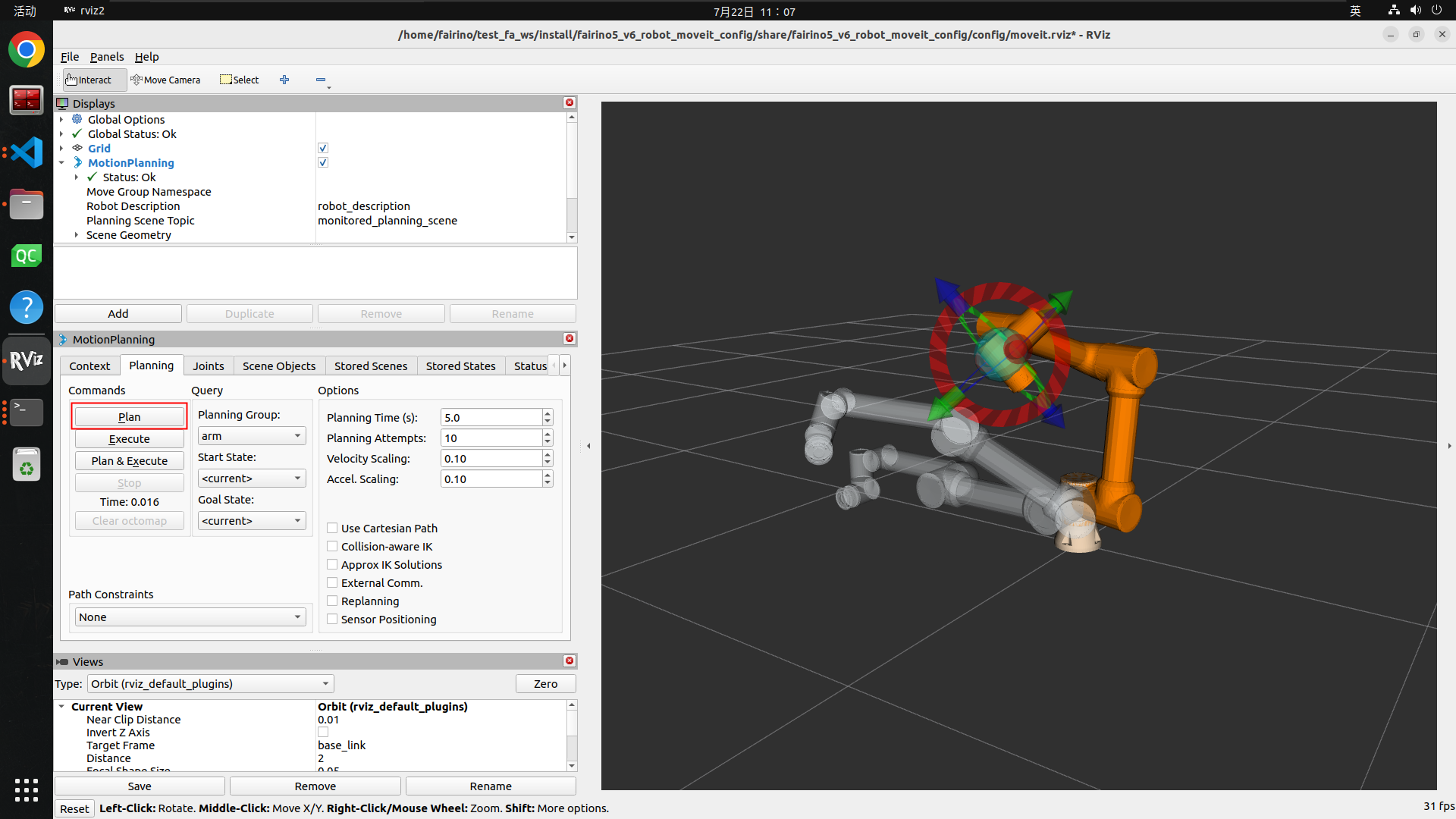
Nach dem Öffnen des konfigurierten Pakets können Sie die Zielposition des Roboters festlegen, indem Sie die blaue Kugel am Ende des Roboters in der 3D-Ansicht auf der rechten Seite ziehen. Die Orientierung des Roboterendes kann über die drei roten, grünen und blauen Ringe geändert werden.
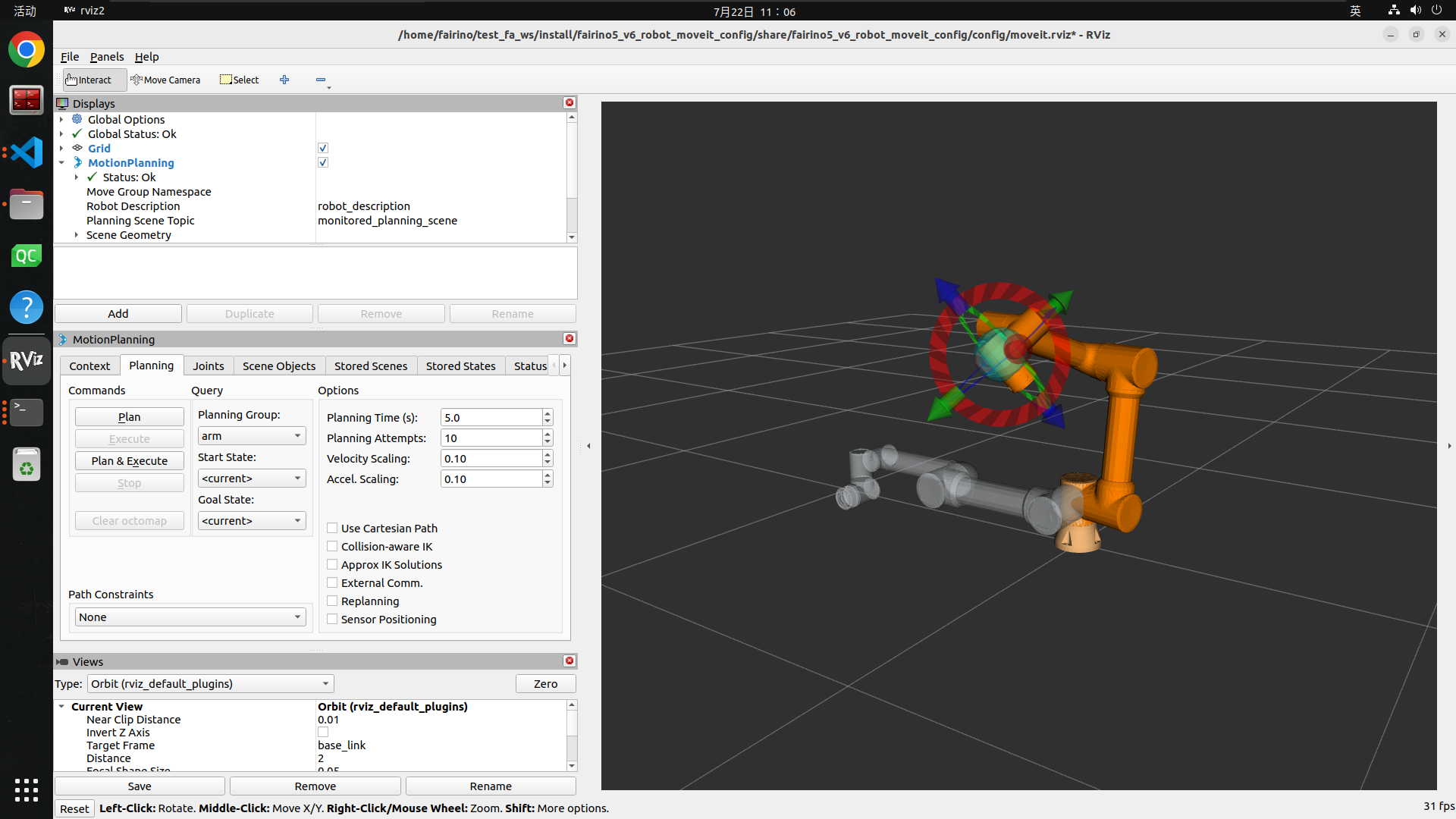
Klicken Sie auf die Schaltfläche „Plan“ auf der linken Seite, um die Bewegungsbahn des Roboters zu planen.
Klicken Sie auf die Schaltfläche „Execute“ auf der linken Seite, um den Roboter entlang der geplanten Bahn zur Zielpose zu bewegen.
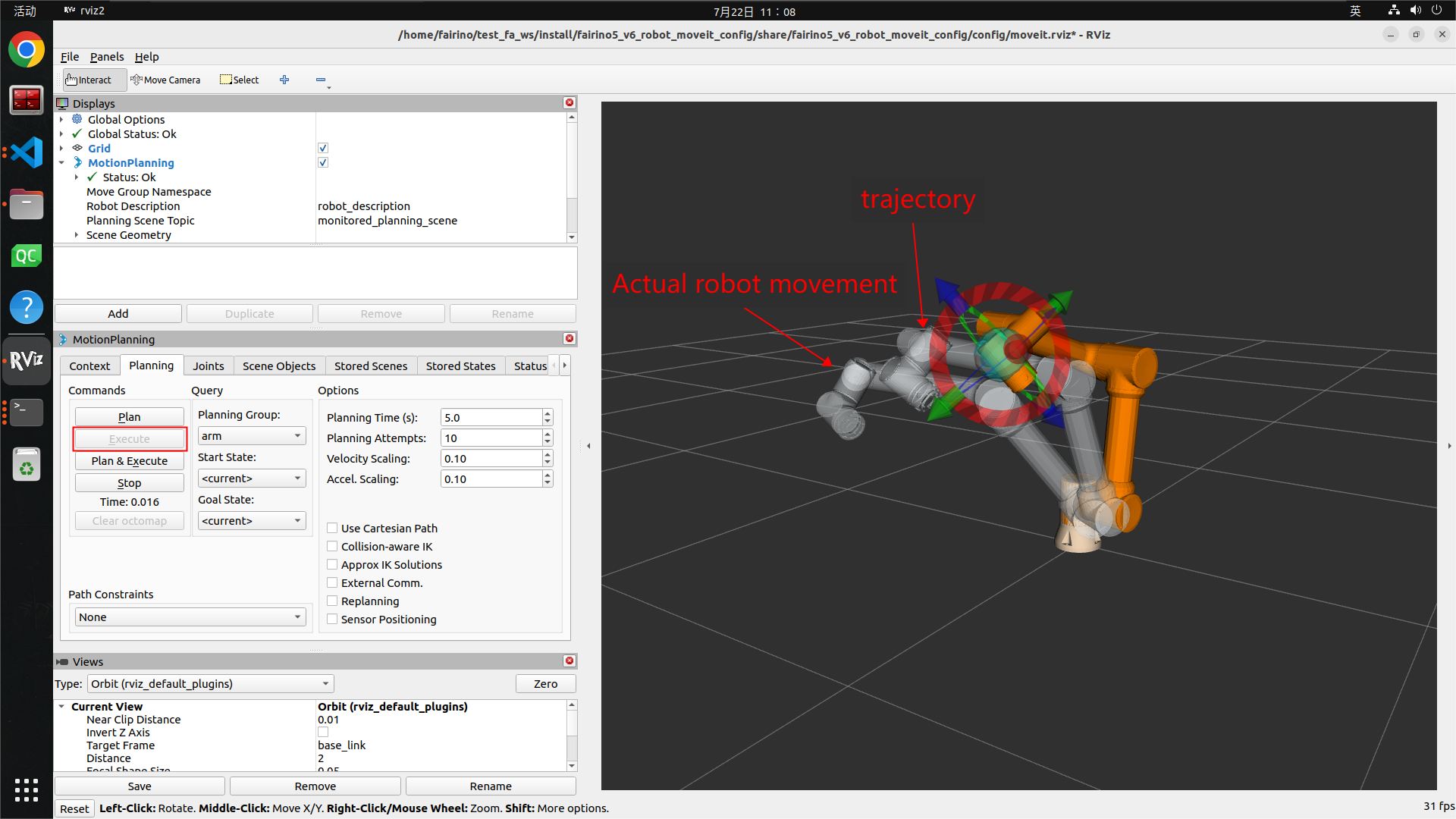
Die Schaltfläche „Plan&Execute“ plant die Bahn und steuert dann automatisch die Roboterbewegung.
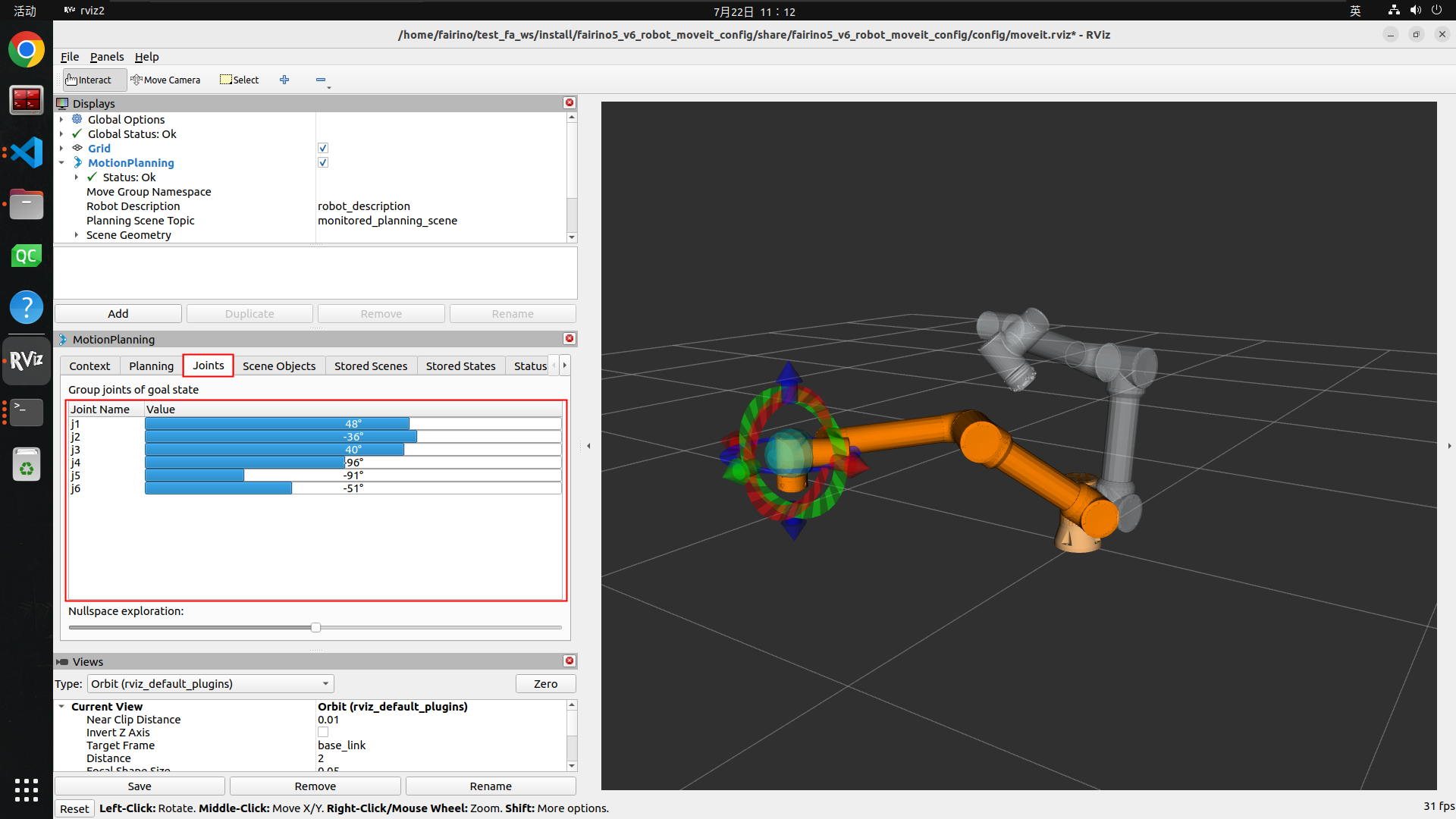
Klicken Sie dann auf den Reiter „Joints“. Hier können Sie durch Ändern der einzelnen Gelenkwinkel die Zielpose des Roboters verändern und dann über die Schaltflächen „Plan“, „Execute“ oder „Plan&Execute“ die Roboterbewegung steuern.
2.3. fairino_hardware-Plugin (benutzerdefiniertes MoveIt-Konfigurationspaket für Roboter)
Das fairino_hardware-Plugin ist die Zwischenschicht, die MoveIt mit dem Roboter verbindet. Über das fairino_hardware-Plugin sendet move_group die Bewegungsplanung an moveit_control, die dann an ros2_control weitergeleitet wird. ros2_control treibt dann über das fairino_hardware-Plugin die tatsächliche Roboterbewegung an. Darüber hinaus empfängt das fairino_hardware-Plugin auch die Rückmeldedaten des tatsächlichen Roboters. Dies ermöglicht die Synchronisation des Robotermodells in der RViz2-Simulationsumgebung mit dem realen Roboter, so dass der Benutzer den realen Roboter über die RViz2-Oberfläche steuern kann.
Durch die Implementierung des fairino_hardware-Plugins wird der FAIRINO-Roboter in das ros2_control-Steuerungsframework integriert, wodurch er mit Drittanbieter-Funktionspaketen kompatibel wird, die auf ros2_control basieren.
Im fairino_hardware-Plugin, das an die Roboter-Softwareversion V3.8.3 angepasst ist, wurden ein Drehmomentmodus und eine Schnittstelle für das Solldrehmoment hinzugefügt. Dadurch kann der Roboterarm in den Drehmomentmodus versetzt werden und Solldrehmomente empfangen.
2.3.1. fairino_hardware-Plugin kompilieren
Kompilieren Sie das fairino_hardware-Plugin-Funktionspaket im offiziell bereitgestellten ros2_ws-Arbeitsbereich. Nach der Kompilierung des fairino_hardware-Plugin-Funktionspakets, wie im vorherigen Abschnitt beschrieben, wird im folgenden Pfad
1ros2_ws/install/fairino_hardware/lib/fairino_hardware
die vom Plugin generierte .so-Datei libfairino_hardware.so sichtbar sein. Dies zeigt an, dass die Plugin-Kompilierung erfolgreich war.
Es ist wichtig, dass die Benennung der einzelnen Roboter-Gelenke im fairino_hardware-Plugin mit der Benennung der Roboter-Gelenke in der MoveIt2-Konfiguration übereinstimmt. In diesem fairino_hardware-Plugin sind die sechs Gelenke des Roboters von der Basisposition bis zum Roboterende als j1, j2, j3, j4, j5, j6 benannt. Daher müssen die Gelenke des Roboters bei der MoveIt2-Konfiguration als j1, j2, j3, j4, j5, j6 benannt werden.
2.3.2. fairino_hardware-Plugin verwenden
Wenn Sie das konfigurierte, benutzerdefinierte MoveIt-Konfigurationspaket für Ihren Roboter verwenden, navigieren Sie zum Verzeichnis
1/home/fairino/test_fa_ws/install/fairino5_v6_robot_moveit_config/share/fairino5_v6_robot_moveit_config/config
und suchen Sie die Datei fairino5_v6_robot.ros2_control.xacro. Ersetzen Sie den Parameter in Zeile 3 der Datei
1use_fake_hardware:=false
durch
1use_fake_hardware:=true
Gemäß der folgenden if-Abfrage wird durch Setzen von use_fake_hardware auf true das Plugin fairino_hardware/FairinoHardwareInterface aktiviert. Speichern Sie die Datei und schließen Sie sie.

Der in der Hardware-Plug-in-Einstellung verwendete Plugin-Name ist „fairino_hardware/FairinoHardwareInterface“. Der genaue Name kann in der Datei fairino_hardware.xml im Verzeichnis /home/fairino/ros2_ws/src/fairino_hardware eingesehen werden.

Beachten Sie, dass der Parameter robot_control_mode in Zeile 3 der Datei die beim Laden des Plugins bereitgestellte Befehls-Schnittstelle bestimmt. Der Parameter repräsentiert den Steuerungsmodus: 0 für Positionssteuerungsmodus, das Plugin stellt dann eine position-Schnittstelle bereit; 1 für Drehmomentsteuerungsmodus, das Plugin stellt dann eine effort-Schnittstelle bereit. Ein Demo für die Drehmomentsteuerungsschnittstelle wird voraussichtlich in einer an die Roboter-Softwareversion V3.8.5 angepassten Version des fairino_hardware-Funktionspakets erscheinen.
Der aktuelle MoveIt2-Controller unterstützt nur den Positionssteuerungsmodus. Setzen Sie robot_control_mode daher nicht auf 1.
2.3.3. Plugin ausführen
Öffnen Sie ein Terminal, wechseln Sie in den Arbeitsbereich ros2_ws und führen Sie source für den Arbeitsbereich aus. Dies dient dazu, das fairino_hardware-Plugin hinzuzufügen. Der Pfad kann auch in der Datei ~/.bashrc geladen werden, was aber nicht empfohlen wird.
1cd ros2_ws
2source install/setup.bash
Gehen Sie dann zurück zum Hauptverzeichnis, wechseln Sie in den Arbeitsbereich test_fa_ws und führen Sie source für diesen Arbeitsbereich aus. Führen Sie dann die Datei demo.launch.py aus.
1cd ..
2cd test_fa_ws
3source install/setup.bash
4ros2 launch fairino5_v6_robot_moveit_config demo.launch.py
2.3.4. Ausführungsergebnis
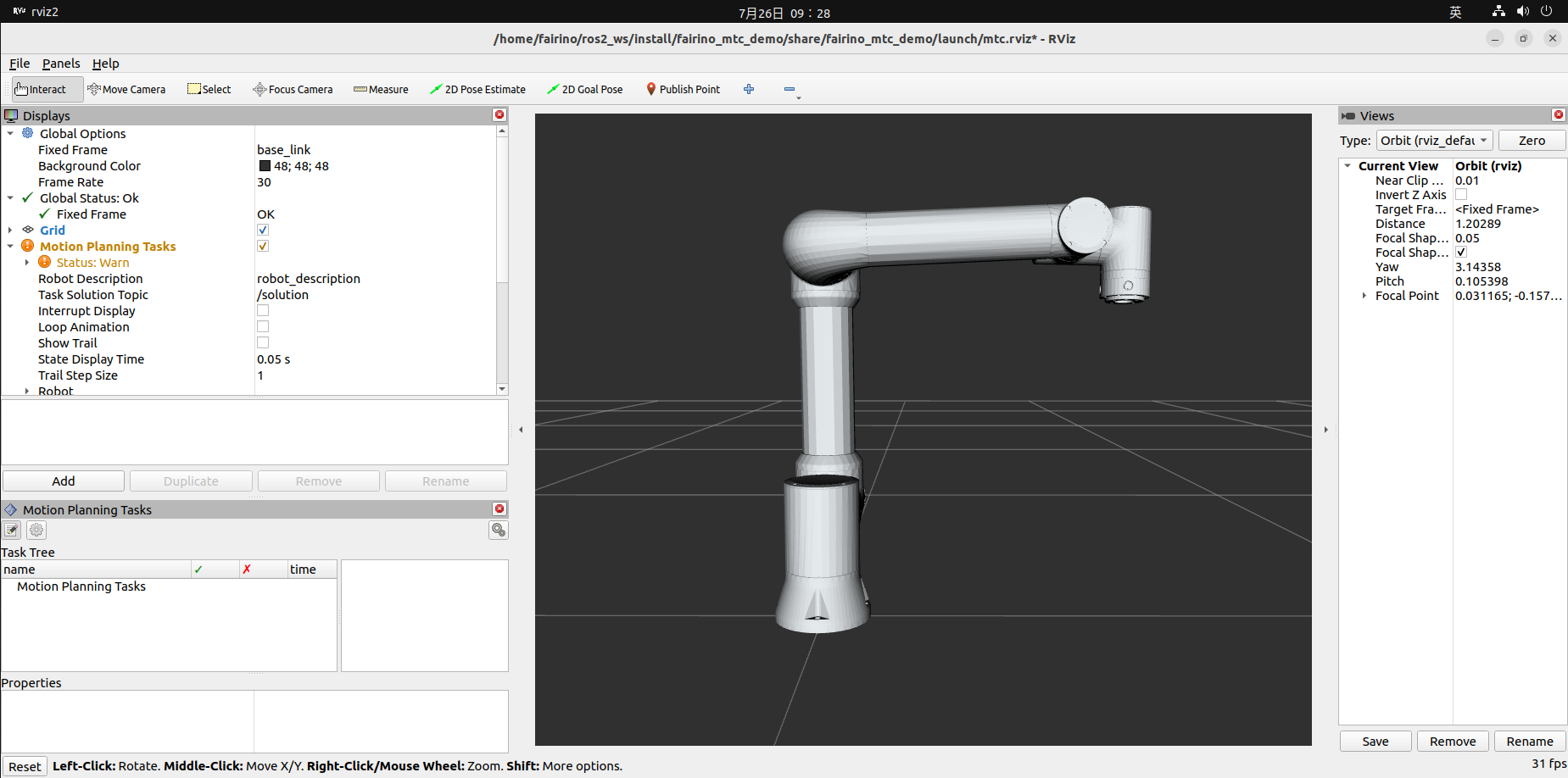
Nach dem Start der Datei demo.launch.py sieht die RViz2-Oberfläche wie folgt aus:
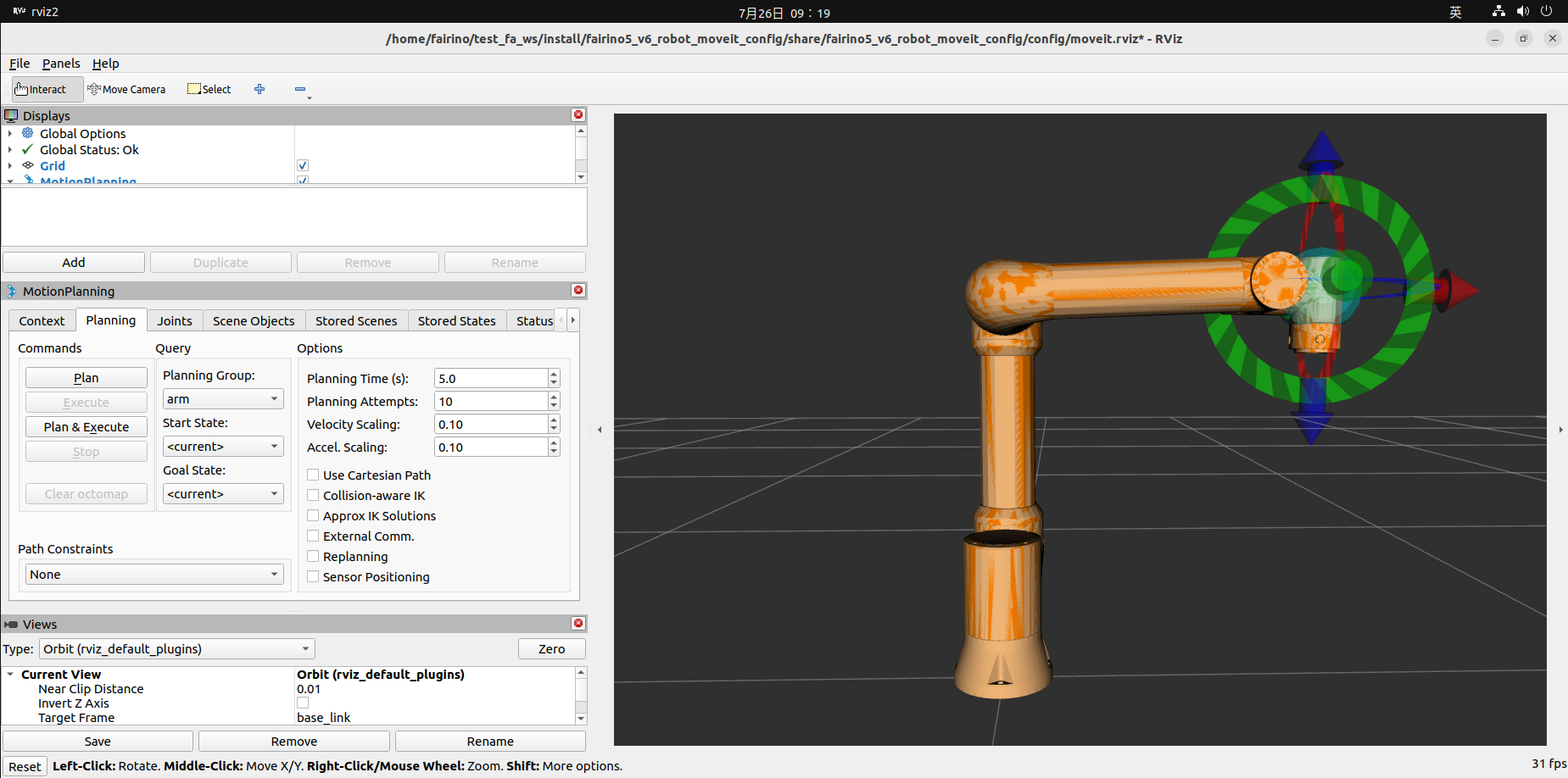
Der Hauptunterschied der gestarteten RViz2-Oberfläche zu der in Abschnitt 3.3.1 ist die anfängliche Roboterpose. Da nun das fairino_hardware-Plugin eingebunden ist, empfängt dieses Plugin in Echtzeit die Gelenkzustände des tatsächlichen Roboters und gibt sie über ros2_control an move_group zurück. Dies steuert wiederum die Pose des Simulationsroboters auf der RViz2-Oberfläche und synchronisiert so den realen Roboter mit dem RViz2-Simulationsroboter.
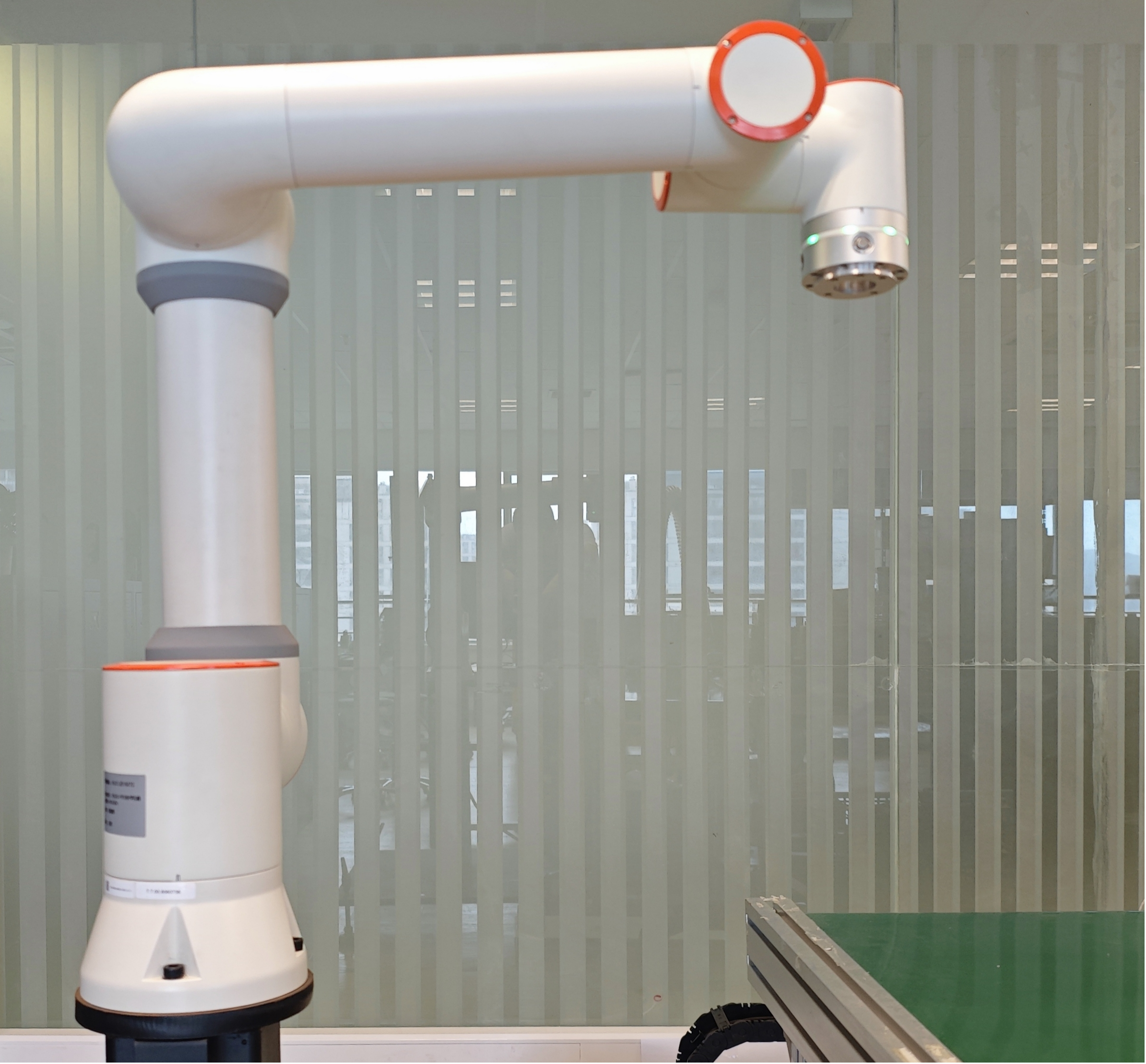
Die tatsächliche Roboterpose zu diesem Zeitpunkt ist unten dargestellt:

Nun kann der reale Roboter über die RViz2-Oberfläche gesteuert werden. Ziehen Sie die blaue Kugel am Ende des Roboters in der RViz2-Oberfläche, um das Roboterende an eine Zielposition zu bewegen. Ziehen Sie dann die roten, grünen und blauen Ringe am Roboterende, um die Orientierung des Roboterendes zu ändern. Klicken Sie dann auf die Schaltfläche „Planning&Execute“ auf der linken Seite. Es wird eine Bewegungsbahn geplant und der Roboter zur Bewegung angesteuert. Sie werden feststellen, dass sich der reale Roboter synchron mit dem Simulationsroboter auf der RViz2-Oberfläche bewegt und an der Zielpose anhält.
Das folgende Bild zeigt die Steuerung des realen Roboters und des RViz2-Simulationsroboters über die RViz2-Oberfläche, bis sie die Zielpose erreicht haben.

Damit kann der reale Roboter über MoveIt2 synchron mit dem Simulationsroboter auf der RViz2-Oberfläche bewegt werden.
3. mtc-Beispielcodepaket
3.1. Einführung in das mtc-Beispielcodepaket
Das mtc-Beispielcodepaket bietet eine mit MoveIt2 und dem fairino_hardware-Plugin neu gestaltete RViz2-Oberfläche. Der ursprüngliche Reiter „MotionPlanning“ wurde durch den Reiter „Motion Planning Tasks“ ersetzt, der die verschiedenen Phasen der Roboterbewegung anzeigt. Die RViz2-Oberfläche kann über die Datei mtc.rviz im Pfad
1ros2_ws/install/fairino_mtc_demo/share/fairino_mtc_demo/launch
bearbeitet werden. Benutzer können die Datei mtc.rviz editieren, um eine RViz2-Oberfläche zu erstellen, die ihren funktionalen Anforderungen entspricht.
Darüber hinaus bietet das mtc-Beispielcodepaket ein Beispiel, bei dem der Roboter mit MoveIt2 und dem fairino_hardware-Plugin wiederholt ein Ziel greift. Anhand dieses Beispiels können Benutzer lernen, wie sie über Code besser mit MoveIt2 und dem fairino_hardware-Plugin interagieren können. Darauf aufbauend können sie individuelle Anpassungen entsprechend ihren Anforderungen vornehmen.
3.2. mtc-Beispielcodepaket kompilieren
3.2.1. mtc-Beispielcodepaket klonen
Klonen Sie das offiziell bereitgestellte mtc-Beispielcodepaket „fairino_robot“ in das src-Verzeichnis des Arbeitsbereichs „ros2_ws“.
3.2.2. Robotermodell auswählen
Wählen Sie in der Datei mtc_demo_env.launch.py im Verzeichnis
1ros2_ws/src/fairino_robot/fairino_mtc_demo/launch
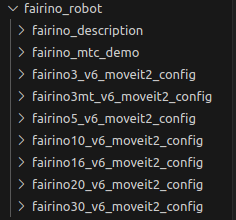
des offiziell bereitgestellten mtc-Beispielcodepakets das Robotermodell aus. Ändern Sie die Zeilen 9, 10 und 11 in dieser Datei, um sie an den gewünschten Roboter anzupassen.

Die konkrete Benennung der Robotermodelle kann den Funktionspaketen der verschiedenen Robotermodelle im Verzeichnis
1ros2_ws/src/fairino_robot/
entnommen werden.
3.2.3. mtc-Beispielcodepaket kompilieren
Kompilieren des fairino_description-Funktionspakets
Öffnen Sie ein Terminal, wechseln Sie in das Verzeichnis ros2_ws und kompilieren Sie das Funktionspaket fairino_description. Führen Sie anschließend source aus.
1cd ros2_ws
2colcon build --packages-select fairino_description
3source install/setup.bash
Kompilieren des Robotermodell-Funktionspakets
Kompilieren Sie im Verzeichnis ros2_ws das Funktionspaket, das dem Robotermodell entspricht, am Beispiel des Roboters fairino5.
1colcon build --packages-select fairino5_v6_moveit2_config
2source install/setup.bash
Dann muss das fairino_hardware-Plugin hinzugefügt werden, um die Synchronisation mit dem tatsächlichen Roboter zu ermöglichen. Wechseln Sie in das Verzeichnis
1ros2_ws/install/fairino5_v6_moveit2_config/share/fairino5_v6_moveit2_config/config
und suchen Sie die Datei fairino5_v6_robot.ros2_control.xacro. Ersetzen Sie in Zeile 9 der Datei
1<plugin>mock_components/GenericSystem</plugin>
durch
1<plugin>fairino_hardware/FairinoHardwareInterface</plugin>
Speichern Sie die Datei und schließen Sie sie.

Kompilieren des fairino_mtc_demo-Funktionspakets
Kompilieren Sie das Funktionspaket fairino_mtc_demo und führen Sie source aus.
1colcon build --packages-select fairino_mtc_demo
2source install/setup.bash
3.3. mtc-Beispielcodepaket ausführen
3.3.1. RViz2-Oberfläche
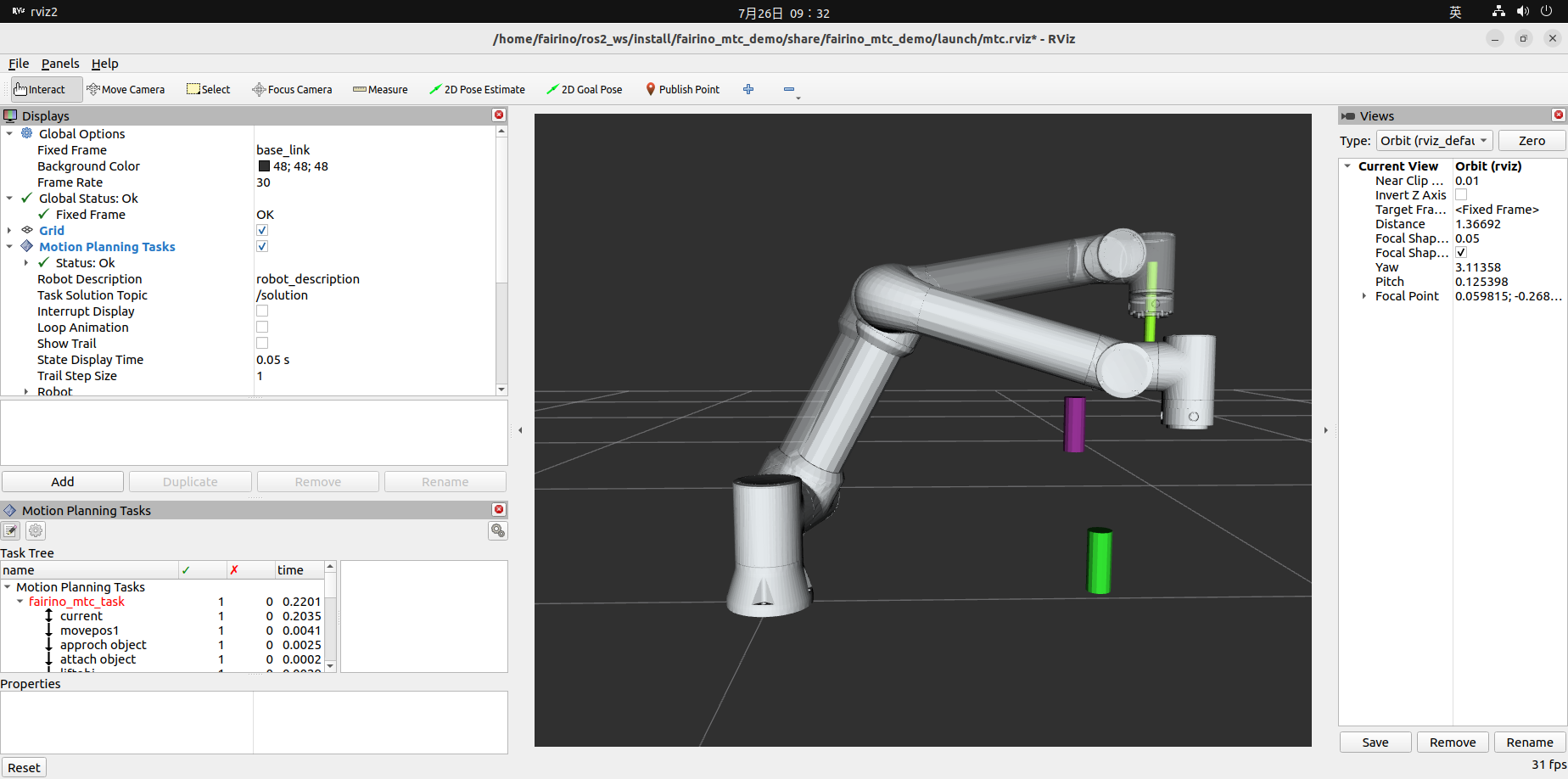
Führen Sie die Datei mtc_demo_env.launch.py aus, um die angepasste RViz2-Oberfläche zu öffnen. Der Reiter „Motion Planning Tasks“ dient zur Anzeige der benutzerdefinierten, einzelnen Bewegungsphasen des Roboters.
1cd ros2_ws
2source install/setup.bash
3ros2 launch fairino_mtc_demo mtc_demo_env.launch.py
3.3.2. Roboterbewegung
Öffnen Sie ein neues Terminal, wechseln Sie in das Verzeichnis ros2_ws, führen Sie source aus und führen Sie die Datei mtc_demo_app.launch.py aus, um die Roboterbewegung auszuführen.
1cd ros2_ws
2source install/setup.bash
3ros2 launch fairino_mtc_demo mtc_demo_app.launch.py
Daraufhin werden im Reiter „Motion Planning Tasks“ der RViz2-Oberfläche die einzelnen Bewegungsphasen des Roboters angezeigt, und der reale Roboter bewegt sich synchron mit dem Simulationsroboter in der RViz2-Oberfläche.

4. Wichtige Hinweise
4.1. Version des fairino_hardware-Plugins synchronisieren
Voraussetzung für die Verwendung des fairino_hardware-Plugins ist, dass die Version des Plugins mit der Version des FAIRINO-Roboters übereinstimmt.
Das fairino_hardware-Plugin empfängt die vom FAIRINO-Roboter zurückgemeldeten Daten, wandelt sie in den von ros2_control vorgegebenen Befehlsdatentyp um und wandelt dann die von ros2_control gesendeten Roboterbewegungsdaten in die für den FAIRINO-Roboter spezifischen Datenframes um.
Daher ist die Übereinstimmung der Datentypen zwischen dem Plugin und dem FAIRINO-Roboter entscheidend. Unterschiedliche Versionen von Plugin und Roboter können zu unterschiedlichen Datentypen führen. Vor dem eigentlichen Testen des fairino_hardware-Plugins muss daher überprüft werden, ob die Version des FAIRINO-Roboters mit der Version des fairino_hardware-Plugins übereinstimmt. Ist dies nicht der Fall, muss der FAIRINO-Roboter aktualisiert werden.
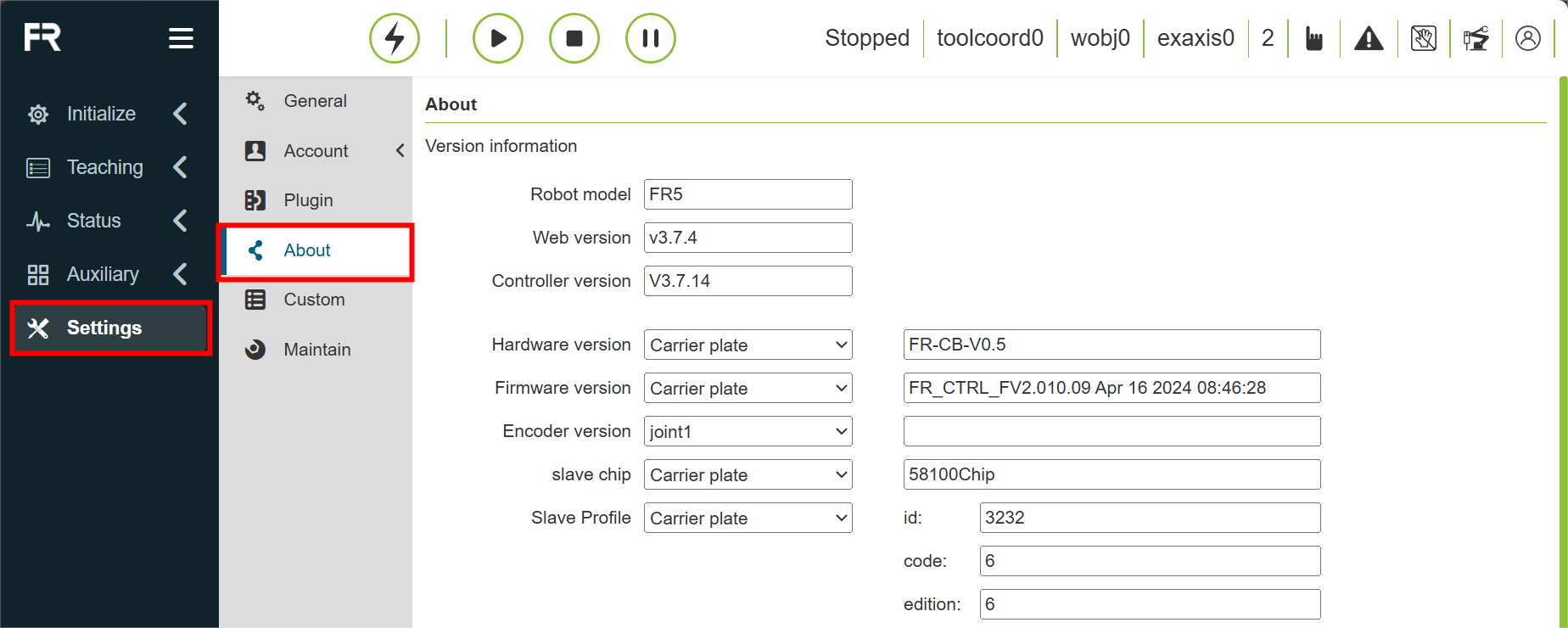
Zunächst können die aktuellen Versionsnummern des Roboters auf der „WebAPP-Oberfläche -> Systemeinstellungen -> Über“ des FAIRINO-Roboters eingesehen werden.
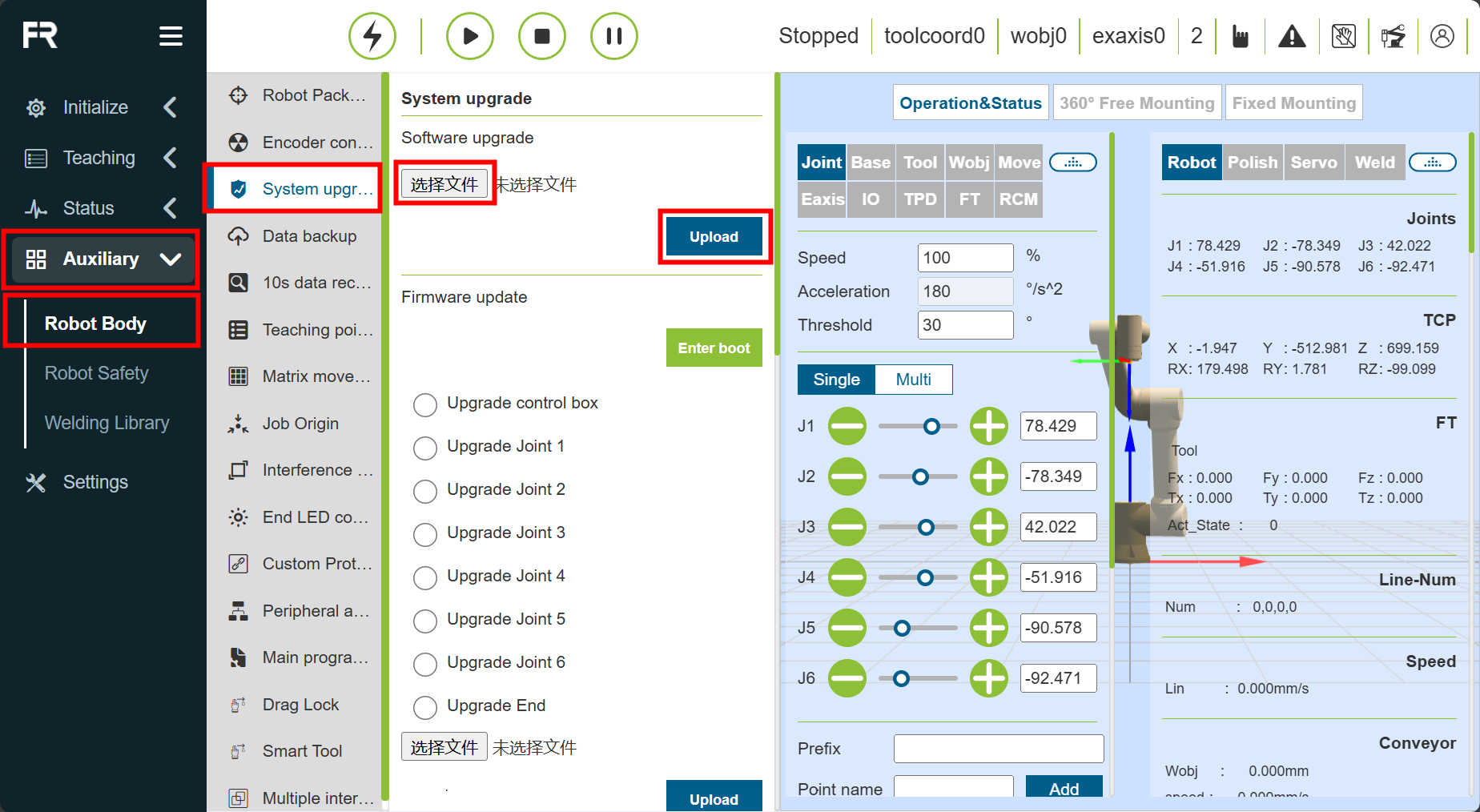
Bereiten Sie dann das offiziell bereitgestellte Roboter-Softwarepaket vor. Navigieren Sie auf der „WebAPP-Oberfläche -> Zusatzanwendungen -> Roboterbasis -> System-Upgrade“ des FAIRINO-Roboters. Klicken Sie auf die Schaltfläche „Datei auswählen“, wählen Sie das vorbereitete Roboter-Software-Upgrade-Paket aus, das der Version des fairino_hardware-Plugins entspricht, und wählen Sie „Upgrade-Paket hochladen“. Warten Sie, bis das Software-Upgrade abgeschlossen ist.
Nach Abschluss des Upgrades fordert das System zum Neustart des Roboters auf. Stellen Sie den Schalter am Roboter-Steuerkasten auf die Aus-Position, warten Sie etwa 25 Sekunden und starten Sie dann den Roboter. Damit ist das Upgrade der Roboter-Softwareversion abgeschlossen, und die Kompilierung und Verwendung des fairino_hardware-Plugins kann fortgesetzt werden.
4.2. Mögliche Probleme
4.2.1. Beim Konfigurieren des Roboter-Funktionspakets wird auf der rechten Seite möglicherweise kein Robotermodell geladen.
Lösung: Dieser Fehler kann auftreten, wenn die Pfade in der .urdf-Datei nicht korrekt sind. Das Problem kann behoben werden, indem die Pfade in der .urdf-Datei korrigiert werden und/oder der meshes-Ordner in das Verzeichnis install/test_moveit/share/test_moveit im Arbeitsbereich kopiert wird.
4.2.2. Nach der Generierung des Pakets treten Laufzeitfehler auf.
Lösung: Löschen Sie in der launches.py-Datei in Zeile 203 den Teil [„capabilities“] in der Zeile default_value=moveit_config.move_gro-up_capabilities[„capabilities“],. Dies sollte das Problem beheben.
5. Zusammenfassung
Dieses Handbuch erläutert die Installation, Konfiguration und Verwendung des MoveIt2-Plugins; die Installation und Verwendung des fairino_hardware-Plugins zur Realisierung der synchronen Bewegung des RViz2-Simulationsroboters mit dem realen Roboter; sowie die Kompilierung und Ausführung des mtc-Beispielcodepakets, um mit Hilfe von MoveIt2 und dem fairino_hardware-Plugin maßgeschneiderte Funktionen zu realisieren.
Wir hoffen, dass diese Anleitung den Benutzern ein umfassenderes Verständnis von MoveIt2 und dem fairino_hardware-Plugin vermittelt und ihnen hilft, die Servicemöglichkeiten des FAIRINO-Roboters besser individuell anzupassen.